Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
Конструктор для изучения основ программирования, конструирования. Arduino робот. Набор позволяет школьникам собрать и запрограммировать несколько моделей роботов
Подробнее| Контроллер | Arduino nano |
| Напряжение питания | 9 В |
| Передаточное число редуктора мотора | 1:48 |
| Плата управления | ЛАРТ R-5M |
| Скорость вращения вала электромотора | 12 000 об/м |
| Шасси | Сталь 0,8 мм |
| Все характеристики |
Конструктор робот представляет собой набор для разработки программируемых моделей автономных роботов.
Робот конструктор с контроллером Ардуино предназначен для дополнительных занятий в средней школе для изучения основ робототехники, программирования микроконтроллеров.
Конструктор робот позволяет собрать модели роботов от самых простых до достаточно сложных систем.
используя штатные отверстия диаметром 4 мм на несущей пластине конструктор можно достраивать различными механизмами, электронными IOT модулями, датчиками препятствий, расстояния, звука и многих других.
Т.е. конструктор Печенег - универсальная система, способная помочь ученикам общеоразовательных школ, студентам профильных учебных заведений средней и высшей школ изучить, отработать, получить навыки конструирования, программирования в различных средах. Познакомится с такими важными способами решения робототехнических задач, как ПИД (пропорционально интегральный дифферинцирующий регулятор), интернет вещей и многими другими технологиями.
Мозгом конструктора является управляющая плата с процессором Atmega328. На ней расположены драйвер электромоторов, система питания робота, колодки для установки ардуино нано и гнезда для подключения внешних электронных модулей.
Повышающий преобразователь питания позволяет устойчиво работать роботу от источника 5 Вольт.
Программируемый контроллер содержит:
- 14 цифровых портов для подключения внешних устройств;
- 6 аналоговых портов;
- Тактовая частота 16 МГц.
- Питание 9-12 Вольт
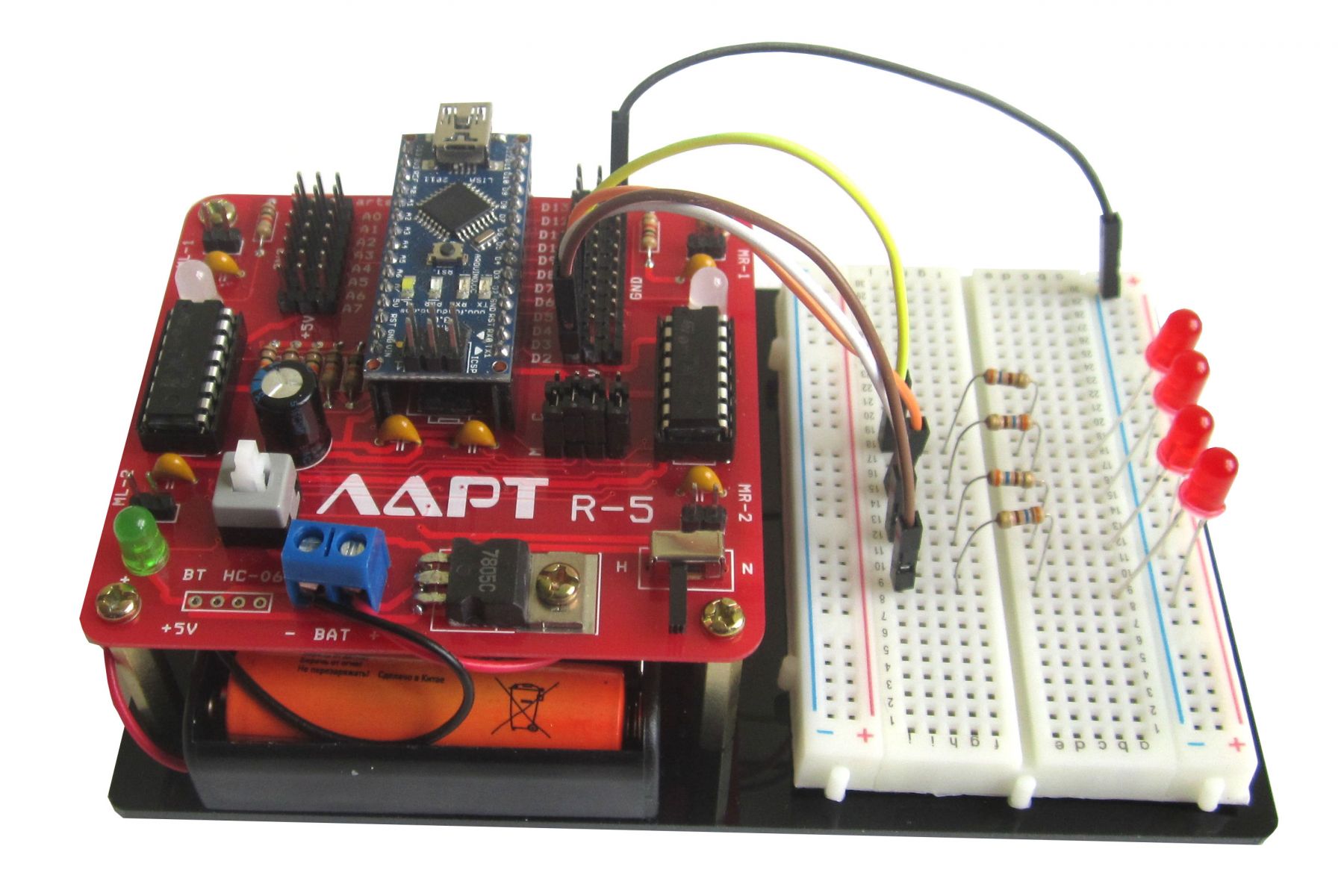
Макетный модуль конструктора позовляет изучить, отладить программы, управляющие роботом до сборки непосредственно самой модели.
Для дополнительных экспериментов с конструктором сформирован ресурсный набор модулей, датчиков и исполнительных устройств
| Наименование | Кол-во |
| Пластина металлическая несущая | 1 |
| Пластина металлическая дополнительная | 1 |
| Пластина акриловая | 1 |
| Уголок крепления мотора | 4 |
| Мотор с редуктором Т-130 ( 1:48, 250 rpm) | 4 |
| Пластиковое колесо 65 мм | 4 |
| Шариковая опора | 1 |
| Сервомотор SG90 | 1 |
| Блок управления R-5 | 1 |
| Контроллер Arduino Nano | 1 |
| USB кабель | 1 |
| УЗ датчик HC-SR04 | 1 |
| Модуль Пищалка | 1 |
| Модуль Светодиод | 2 |
| Модуль Кнопка | 1 |
| Модуль Энкодер | 2 |
| Датчик микрофонный | 1 |
| Датчик линии цифровой | 2 |
| Пластиковое колесо энкодера | 2 |
| Пластиковый держатель УЗ датчика | 1 |
| Батарейный отсек на 6 бат. АА | 1 |
| Макетная беспаечная плата | 1 |
| Светодиод красный 5 мм | 10 |
| Светодиод желтый 5 мм | 2 |
| Светодиод зеленый 5 мм | 2 |
| RGB светодиод | 1 |
| Резистор постоянный 0,5 Вт 360 Ом | 10 |
| Резистор постоянный 0,5 Вт 1 кОм | 4 |
| Резистор постоянный 0,5 Вт 10 кОм | 4 |
| Резистор постоянный 0,5 Вт 30 кОм | 4 |
| Фоторезистор | 1 |
| Винт М3 х 6 мм | 40 |
| Винт М2 х 6 мм | 2 |
| Винт М3 х 25 мм | 8 |
| Гайка М3 | 30 |
| Гайка М2 | 2 |
| Стойка мет. 10 мм | 4 |
| Стойка мет. 25 мм | 4 |
| Стойка мет. 35 мм | 2 |
| Стойка мет. 40 мм | 4 |
| Комплект соединительных проводов М-П 20см | 1 |
| Комплект соединительных проводов М-М 20см | 1 |
Базовый робототехнический набор
| Подготовка к работе | Сборка макетного модуля |
| Установка программного обеспечения | |
| Загрузка первой программы | |
| Эксперименты со сетодиодом | Подключаем светодиод различным пинам Ардуино |
| Изменение частоты включения светодиода | |
| Изменение скважности свечения | |
| Изменение яркости свечения | |
| Эксперименты с кнопкой | Кнопка управляет включением светодиода |
| Эксперименты с пьезоизлучателем | Включение-выключение модуля пьезоизлучателя |
| ШИМ. Управление RGB светодиодом | Управление цветностью светодиода RGB |
| Эксперимент с фоторезистором | включение-выключение светодиода в зависимости от освещенности окружающей среды |
| Эксперимент с микрофонным датчиком | Микрофонный датчик, как дистанционная кнопка |
| Эксперимент с сервомотором | Управление вращением вала сервомотора |
| Эксперимент с ультразвуковым датчиком | Измерение расстояния до препятствия |
| Эксперимент с электромотором | Подключаем драйвер электоромоторов |
| Вращение вала электромоторов вперед-назад | |
| Изменение скорости вращения вала электромоторов | |
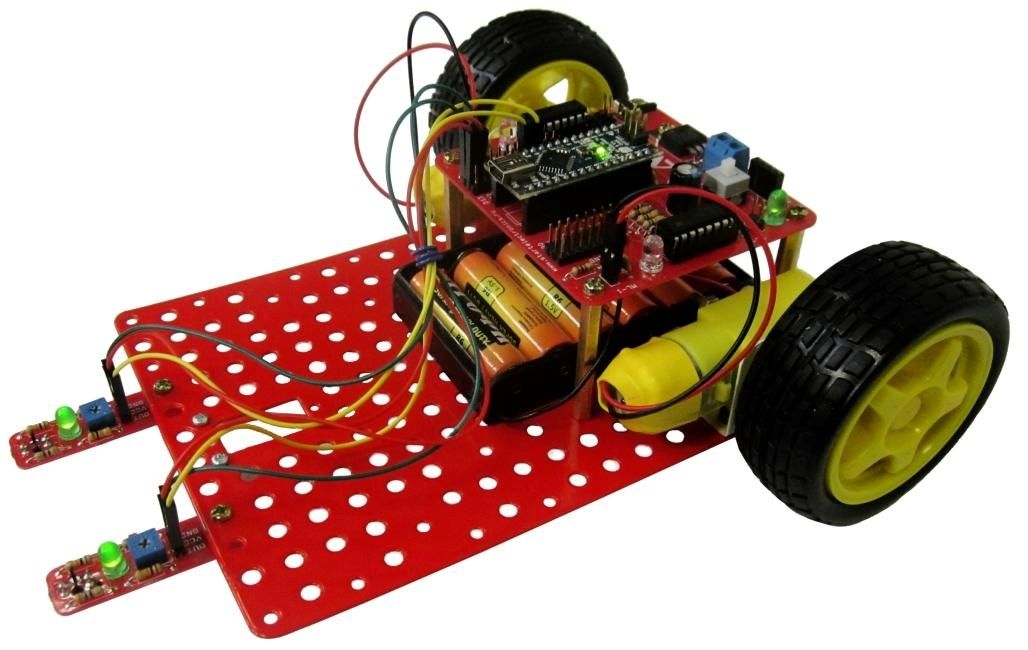
| Сборка двух-моторного шасси | Для первых экспериментов собираем шасси с двумя моторами |
| Тестовый код | Код для движения собранной двухмоторной тележки вперед - назад |
| Эксперименты с управлением движения тележки без датчиков | Движение тележки вправо - влево. |
| Движение тележки "Змейкой" | |
| Измерение скорости движения робота | |
| Измерение количества оборотов электромотора | |
| ШИМ, Изменение скорости движения робота | |
| Подключаем датчики линии | Настройка датчиков. Движение робота по линии |
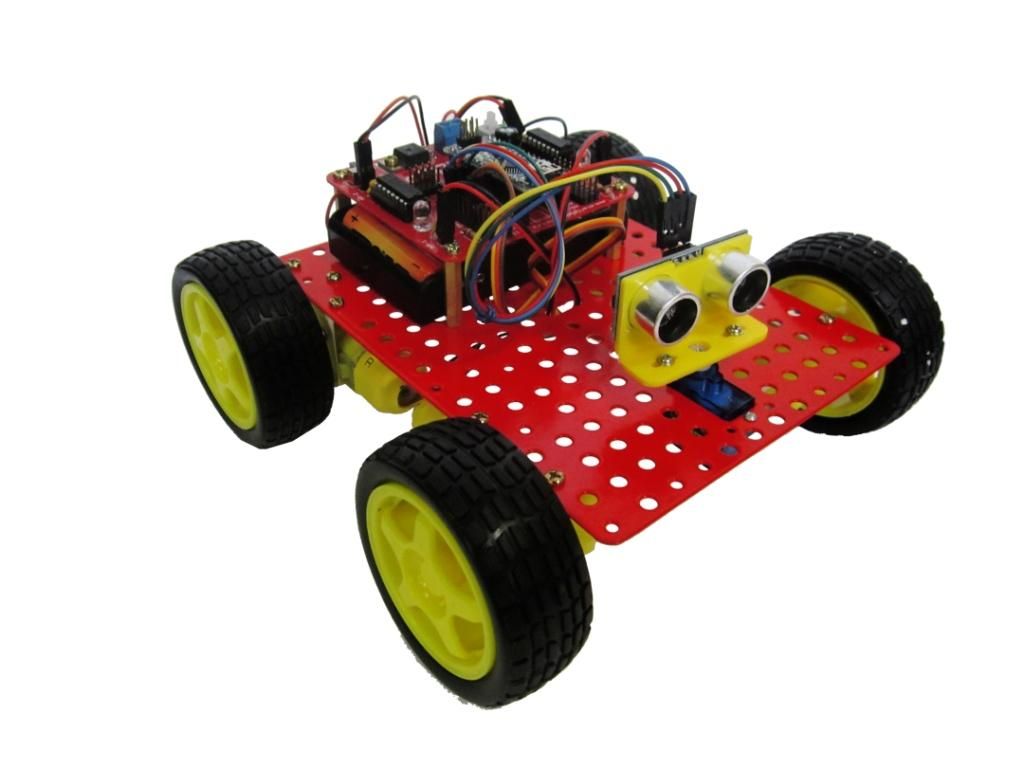
| Собираем четырех-моторное шасси | Устанавливаем четыре мотора на шасси робота |
| Ультразвуковой датчик | Основы теории |
| Устанавливаем сервомотор с УЗ датчиком на шасси. | |
| Обьезжаем препятствия | |
| Микрофонный датчик | Звуком управляем движением робота |
 ПЕЧЕНЕГ Батана")