Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
Уважаемые заказчики. Мы готовы оперативно внести изменения в комплектацию наших наборов для соответствия с вашим ТЗ
Подробнее| Контроллер программируемый | 32-разрядный процессор, с тактовой частотой 240 МГц |
| Привод ведущих колес | 4 редукторных электромотора с энкодером |
| Система технического зрения | Модуль видеокамер OV2640 со встроенным двухъядерным 32-разрядным микропроцессором |
| Управление дистанционное | Wi-Fi |
| Энкодер электромоторов | Инкрементный квадратурный с датчиком Холла |
| Языки программирования С++, Python | Среда разработки Arduino IDE, RTOS |
| Все характеристики |
| Наименование | Кол-во |
| Металлическая рама | 1 шт. |
| Металлический кожух задний | 1 шт. |
| Металлический кожух передний | 1 шт. |
| Металлическая рама для видеокамеры | 1 шт. |
| Электромотор с энкодером | 4 шт. |
| Колесо пластиковое | 4 шт. |
| Сервомотор | 1 шт. |
| Модуль видеокамеры | 1 шт. |
| Плата управляющая с контроллером | 1 шт. |
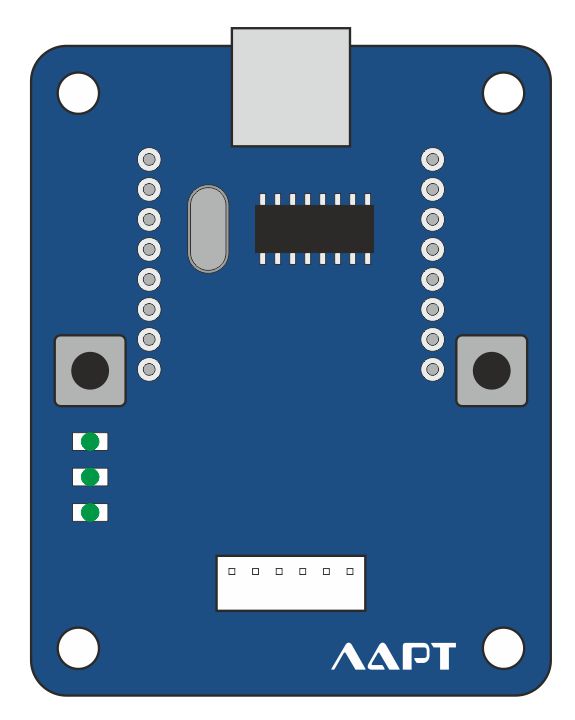
| Модуль дистанционного управления | 1 шт |
| Модуль адаптера для видеокамеры | 1 шт. |
| Модуль зарядного устройства | 1 шт. |
| Набор соединительных проводов | 1 к-т |
| Набор крепежных элементов | 1 к-т |
| Аккумулятор 18650 | 4 шт. |
| Учебные материалы | 1 к-т |
Робот НЕВСКИЙ – мобильный колесный робот, предназначенный для изучения программирования и конструирования.
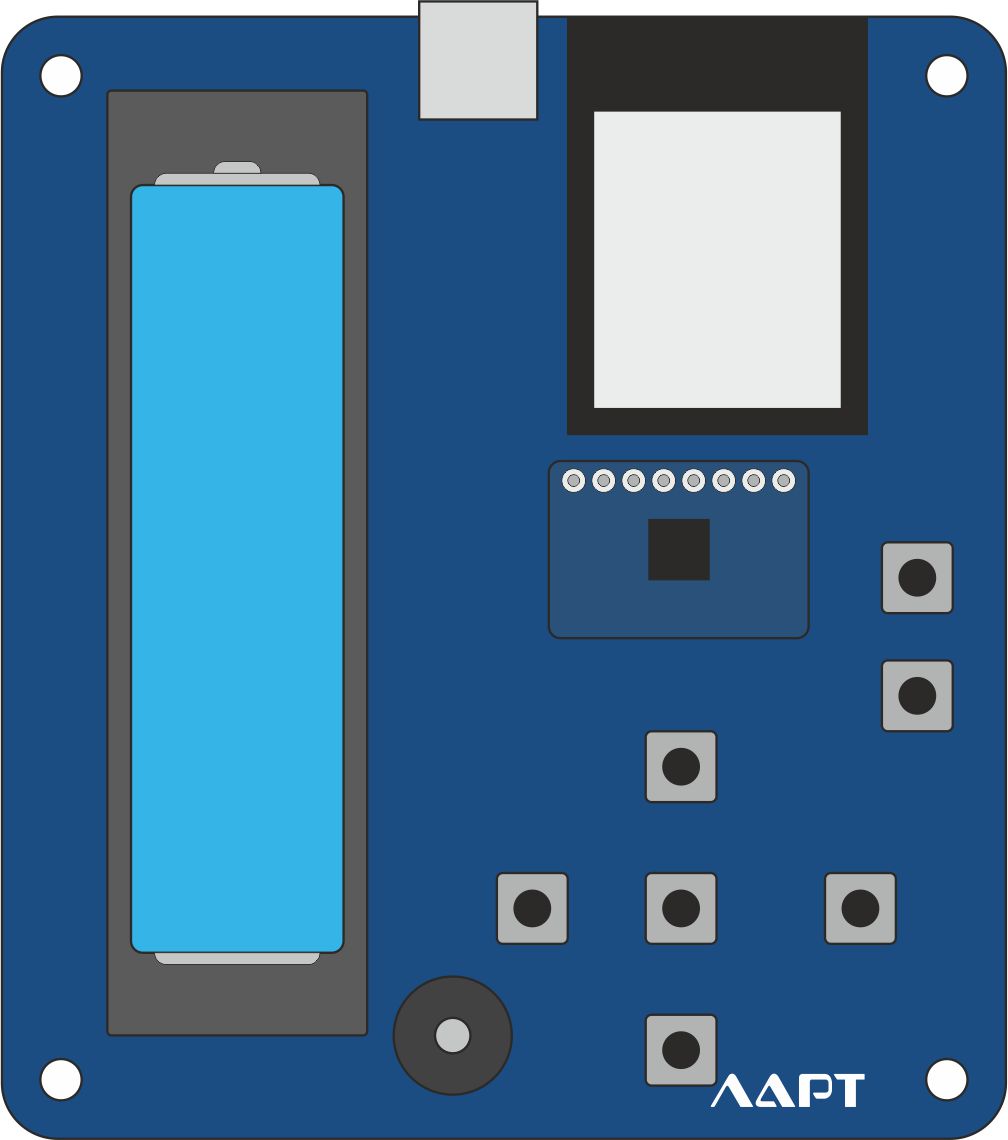
Блок управления с датчиками выполнен в виде моноплаты, на которой размещены контроллер ESP32, элементы питания робота, драйверы двигателей и датчики. В комплекте идет так же модуль компьютерного зрения ESP32 Cam с платой управления электромоторами. Модуль компьютерного зрения устанавливается на поворотный механизм для увеличения угла обзора камеры. Для дистанционного управления роботом в комплекте предусмотрен автономный электронный модуль с контроллером ESP32 и акселерометром MPU6050.
Программирование робота осуществляется в следующих средах:
1. Arduino IDE. Язык программирования С++
2. Mu Editor. Язык программирования MicroPython
3. FreeRTOS
Состав набора и описание компонентов.
Металлическая рама-основание.
Несущая рама выполнены из листовой холоднокатаной стали толщиной 1 мм. На раму крепятся электромоторы, электронные модули.
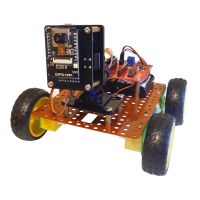
Электромоторы.
В комплект входит 4 редукторных электромотора в пластиковом кожухе. На валы электромоторов установлены магнитные инкрементные квадратурные энкодеры.
Электронные модули.
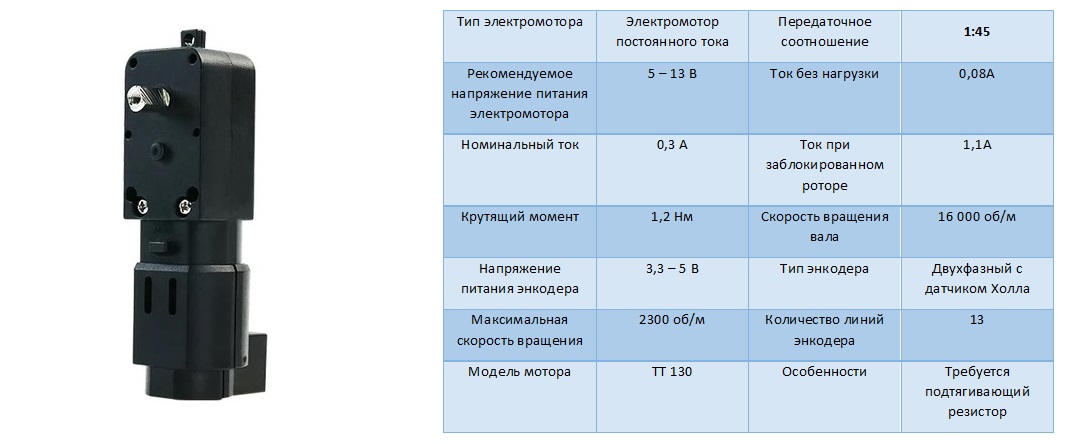
Моноплата М1.
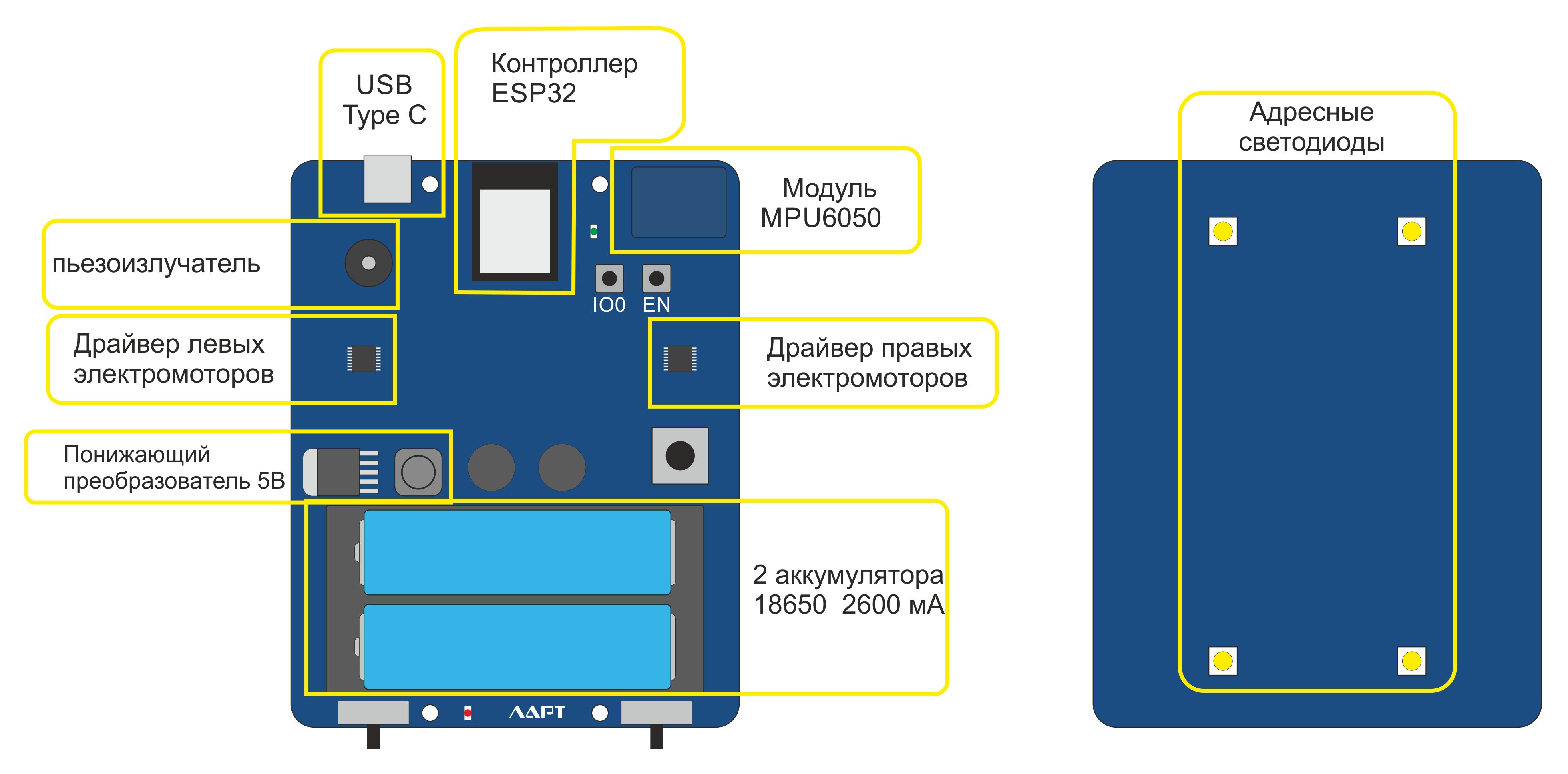
На плате установлен контроллер ESP32, два драйвера электромоторов с разъемами для подключения. Преобразователь питания с блоком аккумуляторов и модуль MPU6050.
Плата М3. Плата для установки и программирования видеокамеры ESP32-CAM.
Конструктор поставляется с учебными материалами со следующим содержанием:
1. Назначение и область применения.
2. Состав набора и описание компонентов.
2.1. Металлическая рама-основание.
2.2. Характеристики двигателя-редуктора и энкодера.
2.3. Электронные модули.
3.Подготовка к работе.
3.1. ESP-WROOM-32 . Характеристики.
3.2. Подготовка среды Arduino IDE для работы с контроллером ESP32.
4. Движение робота.
4.1. Первый тест робота.
4.2. Энкодер.
4.3. Посчитаем импульсы с энкодера.
4.4. Рассчитаем скорость вращения вала редуктора.
4.5. Управление двигателем с помощью энкодера.
5. Акселерометр.
5.1. Введение в модуль MPU6050.
5.2.Описание выводов MPU6050.
5.3. Как влияет гироскоп на положение робота в пространстве.
5.4. Движение робота по прямой линии.
5.5. Управление роботом жестами.
5.5.1. Протокол ESP-NOW.
5.5.2. Настройка робота (приемника).
6. Компьютерное зрение.
6.1. Видеокамера OV2640.
6.2. Подготовка среды программирования.
6.3. Потоковая передача видео в реальном времени с ESP32-CAM.
6.4. Удаленное управление через веб-приложение.
6.5. Подключение видеокамеры.
6.6. Логика управления двигателем.
6.7. Обнаружение препятствий и обход их
6.8. Регистрация данных и отчетность.
7. Программирование в микропайтоне.
7.1. Установка редактора Mu Editor.
7.2. Краткое описание меню редактора.
7.3. Загрузка прошивки MicroPython firmware .bin.
7.4. Мигаем светодиодом.
8. FreeRTOS для ESP32.
8.1. Зачем нужна ОС?
8.2. Многозадачность.
8.3. Параллельные задачи.
8.4. Какое ядро использовать?
8.5. Совместное использование ресурсов.
8.6. Синхронизация задач. Мьютекс и семафор.
8.7. Создание и использование задач в FreeRTOS.
8.8. Приостановка и возобновление задач.
8.9. Первая программа на FreeRTOS.
8.10. Робот на FreeRTOS
Инженерные классы - прогрессивная модель предпрофессионального инженерного образования в современной школе.
Программы обучения включают как основные предметы общеобразовательной школы, так и специальные, необходимые для освоения инженерных практик школьника.
Проект направлен на формирование у школьника интереса к техническому творчеству, более осмысленному подходу к выбору будущей профессии.
ЗАДАЧА ПРОЕКТА «ИНЖЕНЕРНЫЕ КЛАССЫ»
Сформировать у будущих специалистов интерес к техническому творчеству. Максимально самостоятельно, с учетом своих личных возможностей подойти к выбору профессии.
Для реализации проекта школьные лаборатории оснащаются самым современным, необходимым оборудованием.
К разработке учебных инженерных программ подключаются специализированные университеты и профильные промышленные предприятия.