Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
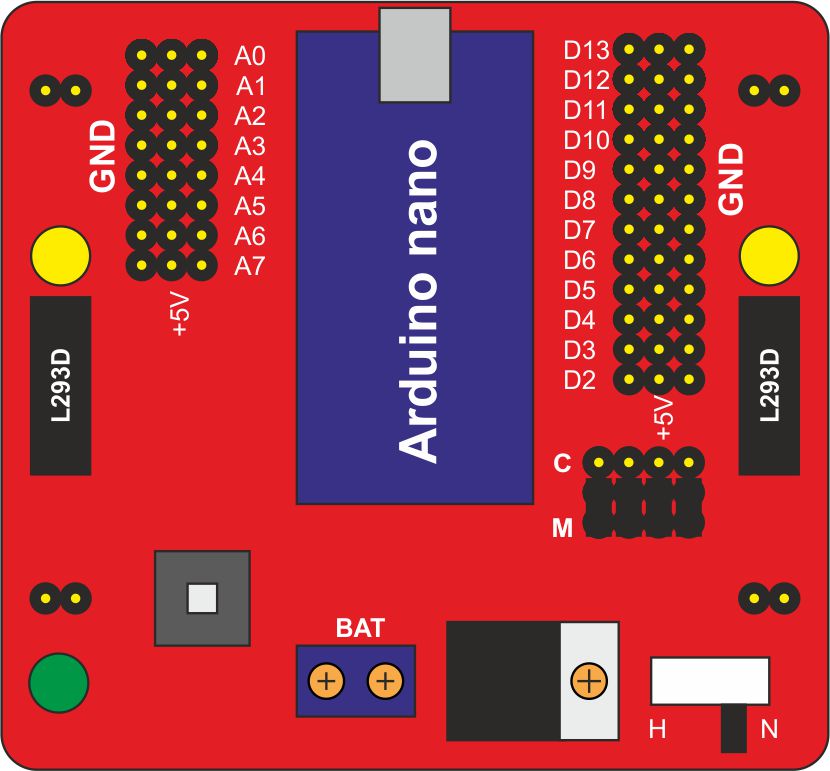
Компактный модуль управления для постройки робота и различных ардуино проектов.
Состав платы:
- Контроллер Arduino NANO
- Стабилизатор питания 5 Вольт.
- Драйвер электромоторов (инвертор 74HC00 и L293D)
- Штыревые разьемы контактов Arduino nano.
- Разьем для подключения модуля Bluetooth.
Совместное использование на плате контроллера Arduino nano, драйвера электромоторов позволяет с минимумом проводов построить управляющий модуль.
Назначение элементов блока R-5
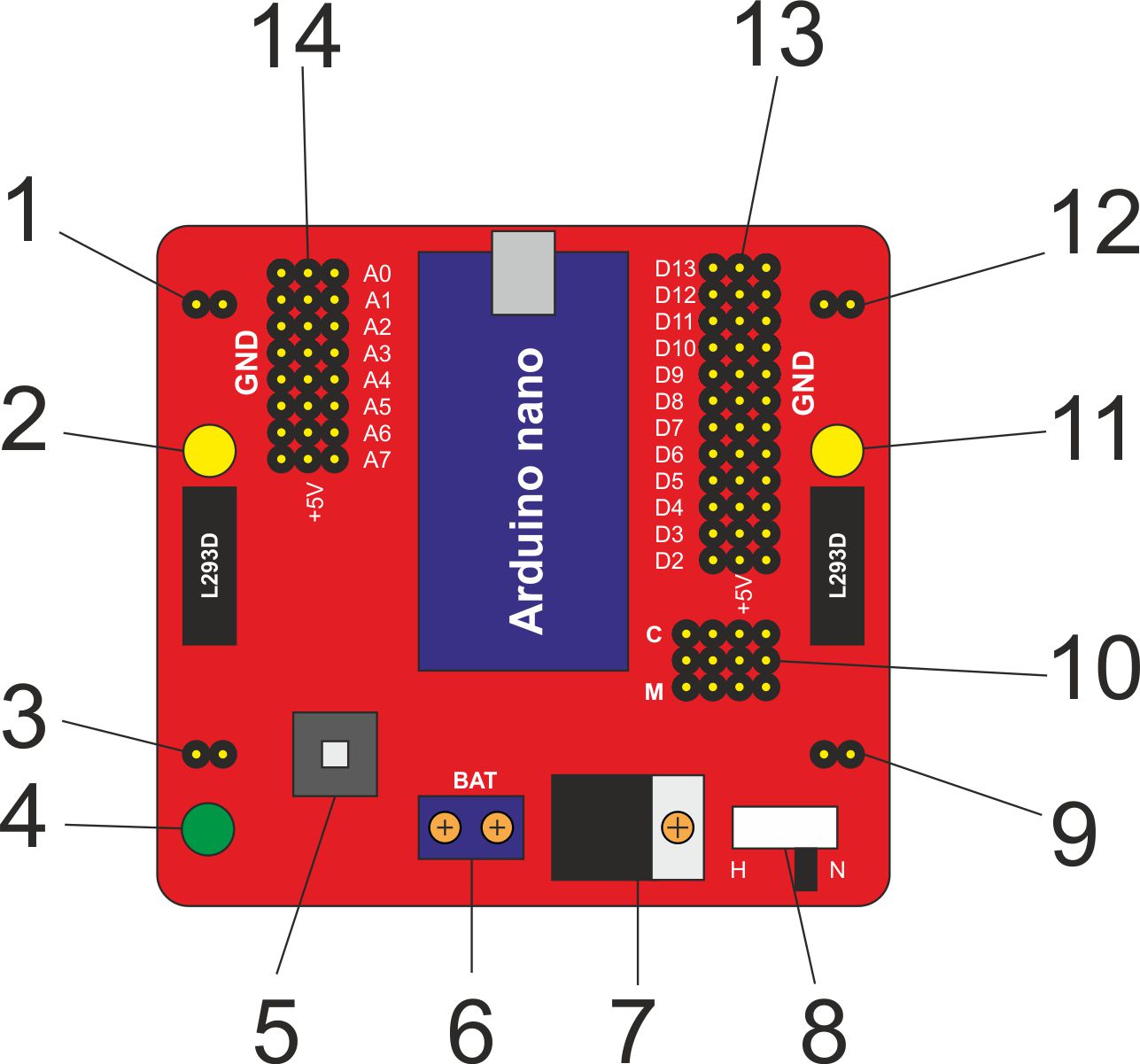
1,3,9,12 – разъемы для подключения электромоторов.
2,11 – двунаправленные светодиоды, индицирующие направление вращения электромоторов.
4 – светодиод – индикатор электропитания.
5 – кнопка включения питания.
6 – клемма для подключения батареи питания.
7 – стабилизатор 5 Вольт.
8 – переключатель питания электромоторов. В положении N на драйвер электромоторов подается напряжение 5 вольт. В положении H на драйвер электромоторов подается питание непосредственно с батареи.
10 – разъем J8 для коммутации цифровых выходов Арудино D2, D3, D4, D5 на вход драйвера или на разъем J2.
13 – разъем J3. К этому разъему выведены соответствующие выходы Ардуино.
14 – разъем J2. К этому разъему выведены аналоговые выходы Ардуино.
Разъемы J2, J3 имеют три ряда контактов. Внешний ряд подключен к минусу батареи (GND), средний ряд подключен к выходу стабилизатора 5 вольт. Внутренние ряды подключены к соответствующим контактам Ардуино.
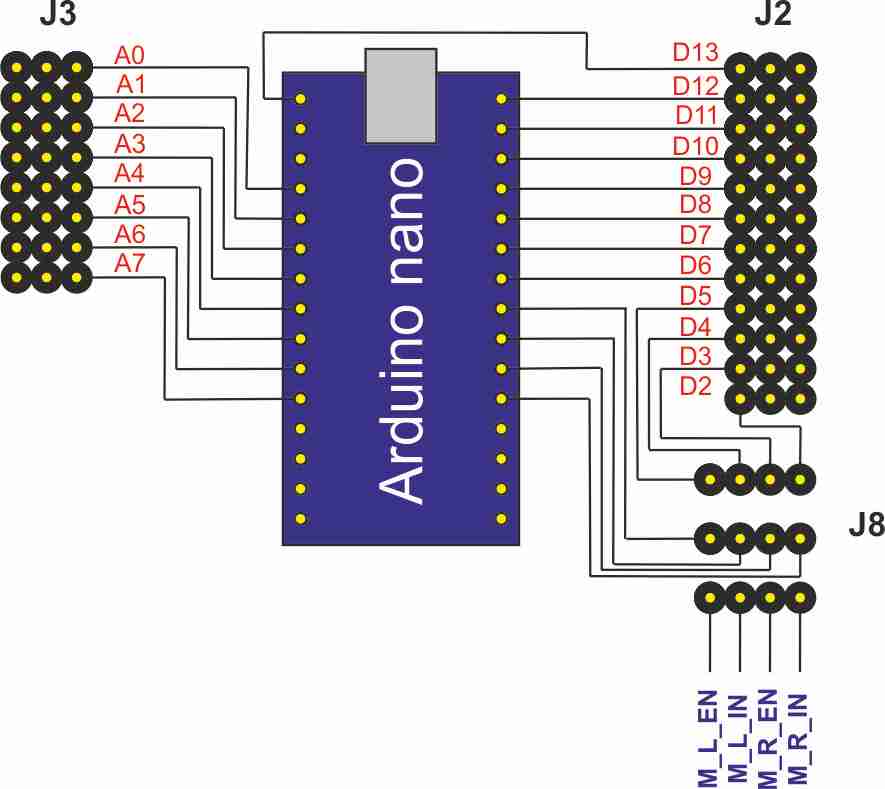
Цифровые и аналоговые контакты платы Arduino nano выведены на соответствующие разъемы J2, J3.
Цифровые контакты D2, D3, D4, D5 с контроллера идут на разъем J8. В разъеме J8 джамперами выходы контроллера подключаются или к разъему J2 или к драйверу элемтромоторов.
Если блок управления R-5 используется для управления роботом, то джамперы необходимо установить в нижнее положение, что бы выходы Ардуино соединились со входами драйвера.
Если блок R-5 используется для других экспериментов, то джамперы необходимо установить в верхнее положение.