Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
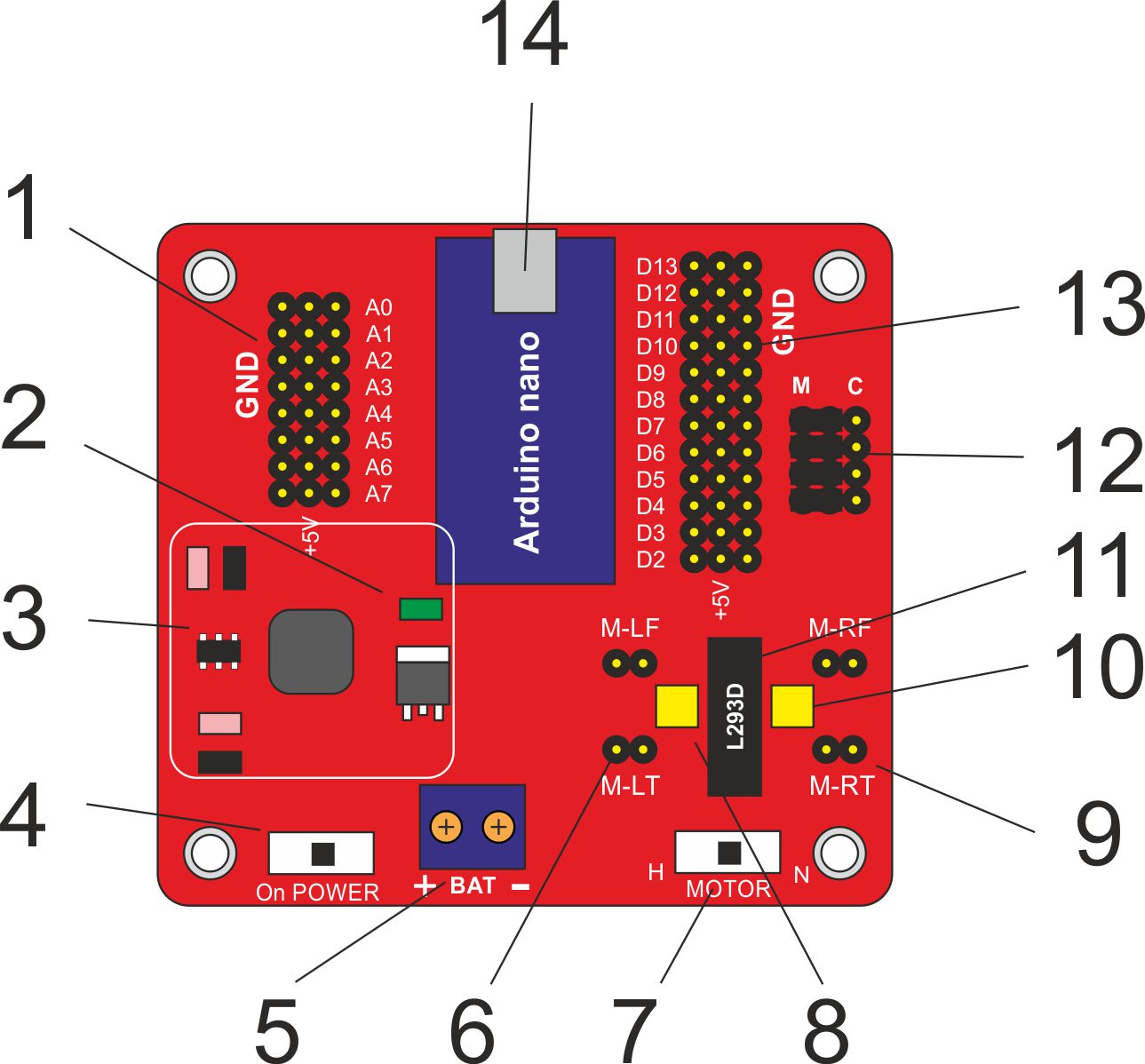
1 - К этому разъему выведены аналоговые выходы Ардуино.
2 - Cветодиод – индикатор электропитания.
3 - Импульчный преобразователь питания. Формирует 9В и 5 вольт для питания элементов схемы.
4 - Выключатель.
5 - Клемма для подключения батареи.
6,9 - гнезда для подключения электромоторов.
7 - Переключатель питания электромоторов. подается или 9Вольт или 5 Вольт.
8,10 - Светодиоды, индицирующие направление вращения электромоторов
11- Микросхема L293D. Драйвер электромоторов
12 - Разъем J8 для коммутации цифровых выходов Арудино D2, D3, D4, D5 на вход драйвера или на общую цифровую шину.
13 - К этому разъему выведены соответствующие выходы Ардуино
,
Разъемы 1, 12 имеют три ряда контактов. Внешний ряд подключен к минусу батареи (GND), средний ряд подключен к выходу стабилизатора 5 вольт. Внутренние ряды подключены к соответствующим контактам Ардуино.
Схема подключения выходов Ардуино
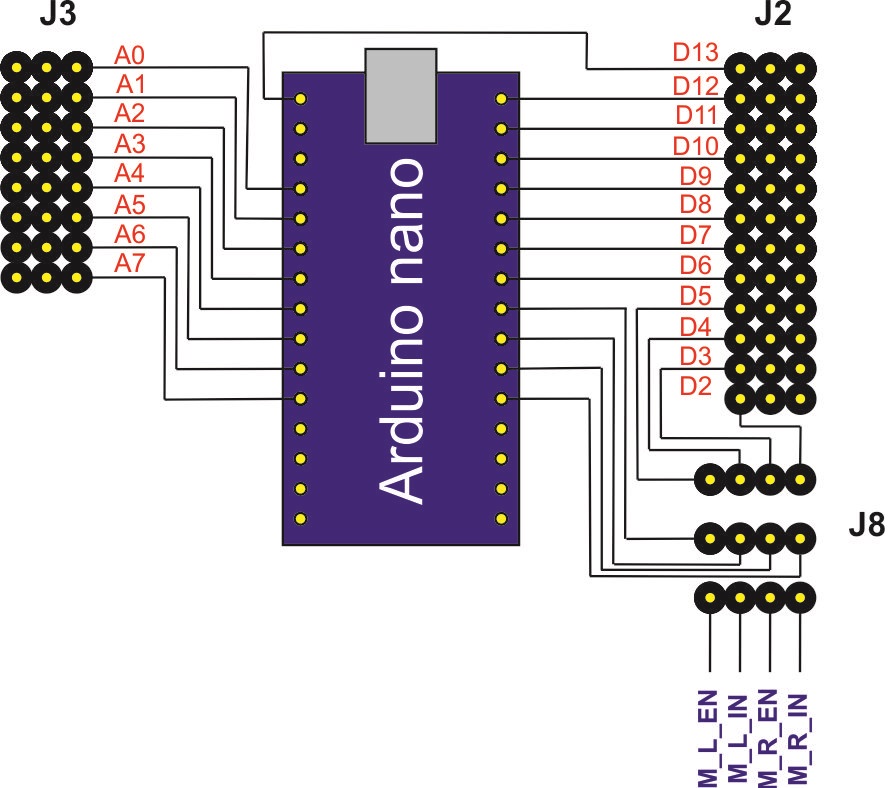
Цифровые и аналоговые контакты платы Arduino nano выведены на соответствующие разъемы.
Цифровые контакты D2, D3, D4, D5 с контроллера идут на разъем J8. В разъеме J8 джамперами выходы контроллера подключаются или к разъему J2 или к драйверу электромоторов.
Если блок управления R-5 используется для управления роботом, то джамперы необходимо установить в левое положение, что бы выходы Ардуино соединились со входами драйвера.
Если блок R-5 используется для других экспериментов, то джамперы необходимо установить в правое положение.
Назначение входов драйвера электромоторов.
M_R_IN – вход драйвера, управляющий направлением вращения правого электромотора. Высокий уровень (HIGHT) – вращение вперед.
M_R_EN – вход драйвера, разрешающий вращение правого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
M_L_IN - вход драйвера, управляющий направлением вращения левого электромотора. Высокий уровень (HIGHT) – вращение вперед.
M_L_IN - вход драйвера, разрешающий вращение левого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
Т.е. исходя из вышесказанного для того, что бы мы могли управлять моторами робота мы должны соединить джамперами средние и левые контакты разъема.



 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Радиореле большой дальности для управления электроприборами удаленных объектов
Радиореле большой дальности для управления электроприборами удаленных объектов
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.








