Регулировка скорости движения.
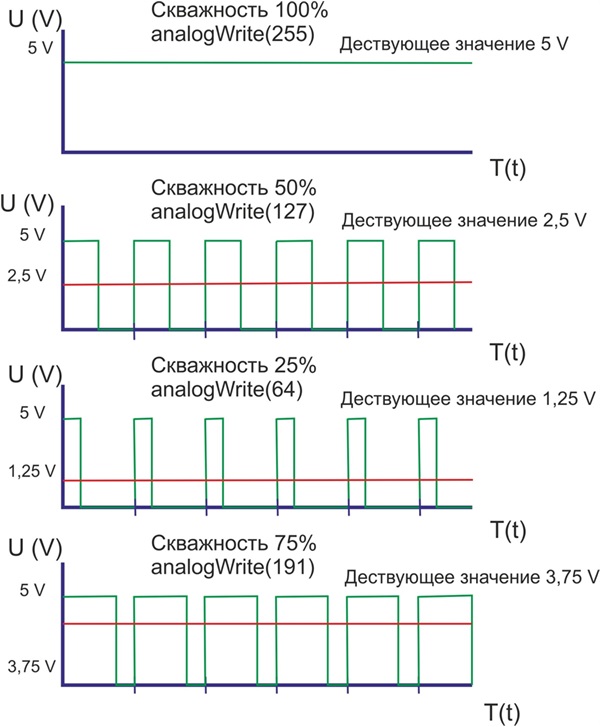
Метод широтно импульсной модуляции (ШИМ, англ. pulse-width modulation (PWM)) широко применяется для управления мощностью, подводимой к нагрузке, путём изменения скважности импульсов, при постоянной частоте.
 Если на выходе устройства, генерирующего ШИМ сигнал установить фильтр низких частот (ФНЧ), то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Фильтр не пропускает несущую частоту ШИМ. На выходе фильтра формируется сигнал с постоянной составляющей. Сам фильтр может состоять из простейшей интегрирующей RC цепи.
Если на выходе устройства, генерирующего ШИМ сигнал установить фильтр низких частот (ФНЧ), то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Фильтр не пропускает несущую частоту ШИМ. На выходе фильтра формируется сигнал с постоянной составляющей. Сам фильтр может состоять из простейшей интегрирующей RC цепи.
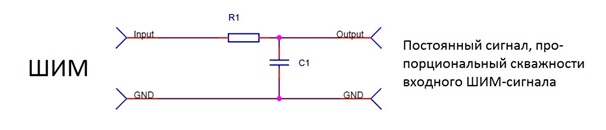
В нашем случае нагрузкой является электродвигатель. Он достаточно инерционен. Поэтому не требуется дополнительных фильтров.
Таким образом, управляя длительностью «единицы» и «ноля» мы получаем необходимое нам значение аналогового сигнала, а в нашем случае напряжение питания электромотора.
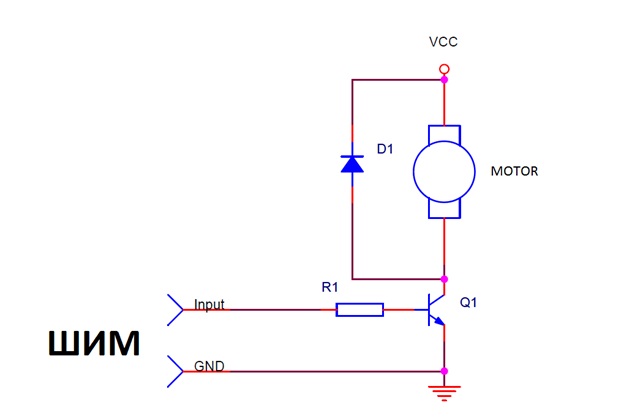
Основным достоинством ШИМ-управления является то, что электронный ключ (обычно транзистор) работает в ключевом режиме, что заметно повышает экономичность схемы, так как потери на активных элементах сводятся к минимуму.
В схеме управления электромотором с помощью ШИМ сигнала параллельно мотору необходимо устанавливать диод для защиты транзистора Q1 от индукционных всплесков, появляющимся в момент выключения и включения. Благодаря использованию диода, индукционный импульс разряжается через него и внутреннее сопротивление двигателя, защищая тем самым транзистор.
Для сглаживания всплесков питания между клеммами мотора, можно подключить конденсатор небольшой емкости (100nF). Это снизит помехи, создаваемые частыми переключениями транзистора Q1.
В контроллере Arduino есть специальные контакты, которые могут формировать сигнал с широтно-импульсной модуляцией. Это D3, D5, D6, D9, D11.
В блоке R-5 пины D3, D5 подключены к входам драйвера, отвечающих за регулировку скорости вращения электромоторов. Соответственно, вызвав функцию analogWrite() мы сможем изменять действующее значение напряжения питания электромоторов и соответственно изменять скорость движения робота.
Пишем код.
Пример 1. УСКОРЕНИЕ.
Последовательно увеличиваем значение ШИМ. С увеличением значения ШИМ скорость движения робота увеличивается.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
|
#define DIR_R 2
#define SPEED_R 3
#define DIR_L 4
#define SPEED_L 5
void setup()
{
pinMode (DIR_R, OUTPUT);
pinMode (SPEED_R, OUTPUT);
pinMode (DIR_L, OUTPUT);
pinMode (SPEED_L, OUTPUT);
}
void loop()
{
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 0); // Значение ШИМ равно нулю, двигатель не вращается
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 0);
delay(1000); // пауза 1 сек.
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 70); // Значение ШИМ 70. Скорость низкая
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 100);
delay(2000);
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 170); // Значение ШИМ 170. Скорость выше
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 170);
delay(2000);
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 255); // Значение ШИМ 255. Скорость максимальная
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 255);
delay(2000);
}
|
Скопируйте текст программы и вставьте его в Arduino IDE.
После проверки загрузите код в контроллер. Установите контроллер в блок R-5 и включите питание робота.
Пример 2. ЗМЕЙКА.
Попеременно устанавливаем разное значение ШИМ для правого и левого колес. Соответственно колеса будут вращаться с разной скоростью, и наш робот будет двигаться змейкой.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
|
#define DIR_R 2
#define SPEED_R 3
#define DIR_L 4
#define SPEED_L 5
void setup()
{
pinMode (DIR_R, OUTPUT);
pinMode (SPEED_R, OUTPUT);
pinMode (DIR_L, OUTPUT);
pinMode (SPEED_L, OUTPUT);
}
void loop()
{
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 0);
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 0);
delay(1000); // пауза 1 сек.
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 100);
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 255);
delay(1000);
digitalWrite (DIR_R, HIGH);
analogWrite (SPEED_R, 255);
digitalWrite (DIR_L, HIGH);
analogWrite (SPEED_L, 100);
delay(1000);
}
|
Пример 3. УСКОРЕНИЕ. ТОРМОЖЕНИЕ.
С помощью сигналов ШИМ мы можем плавно увеличивать и уменьшать скорость движения робота. Для этого нам необходимо воспользоваться оператором
for.
Конструкция, позволяющая нам последовательно увеличивать или уменьшать значение ШИМ, включает цикл
for (initialization; condition; increment) и блок операторов, заключенный в скобки.
for (int i = 40; i < 255; i++)
{
analogWrite (SPEED_R, i);
analogWrite (SPEED_L, i);
delay(50);
}
Инициализация (Initialization) выполняется самой первой и один раз. Каждый раз в цикле проверяется
условие (condition), если оно верно, выполняется блок операторов и
приращение (increment), затем условие проверяется вновь. Когда логическое значение условия становится ложным, цикл завершается.
Эта запись означает следующее:
К целочисленной переменной
i, которая вначале равна 40 прибавляется
1 (i++), пока её значение меньше либо равно
255. При каждом значении переменной
i будут выполняться операции, записанные в фигурных скобках (тело цикла). Т.е. значение ШИМ каждые
50 мили секунд от значения
40 будет возрастать до значения
255. Каждый раз в цикле проверяется условие
i<255. Если условие, верно, то выполняется блок операторов и приращение значения
i. Затем условие проверяется вновь. Когда логическое значение условия становится ложным, цикл завершается. И наш робот начинает двигаться с постоянной максимальной скоростью.
Точно так же будет происходить и уменьшение скорости.
for (int i = 255; i > 0; i--)
Цикл
for мы можем использовать так же и для записи однотипных команд. В блоке
setup нам необходимо пины 2,3,4,5 определить, как выходы. И вместо команды для каждого пина, как мы делали ранее,
void setup()
{
pinMode (DIR_R, OUTPUT);
pinMode (SPEED_R, OUTPUT);
pinMode (DIR_L, OUTPUT);
pinMode (SPEED_L, OUTPUT);
пишем цикл, в котором в качестве переменной
i указываем номера пинов.
void setup () {
for (int i=2; i<=5; i++) {
pinMode (i, OUTPUT);
}
}
Пишем итоговый код.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
|
#define DIR_R 2
#define SPEED_R 3
#define DIR_L 4
#define SPEED_L 5
void setup () {
for (int i=2; i<=5; i++) {
pinMode (i, OUTPUT);
}
// укажем, что изначально моторы остановлены
digitalWrite (SPEED_R, LOW);
digitalWrite (SPEED_L, LOW);
}
void loop()
{
digitalWrite (DIR_R, HIGH);
digitalWrite (DIR_L, HIGH);
for (int i = 40; i < 255; i++)
{
analogWrite (SPEED_R, i);
analogWrite (SPEED_L, i);
delay(50);
}
for (int i = 255; i > 0; i--)
{
analogWrite (SPEED_R, i);
analogWrite (SPEED_L, i);
delay(50);
}
digitalWrite (SPEED_R, LOW);
digitalWrite (SPEED_L, LOW);
delay(1000);
}
|
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 Проекты на ESP32
Проекты на ESP32
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Дистанционное управление электроприборами
Дистанционное управление электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.







