Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.

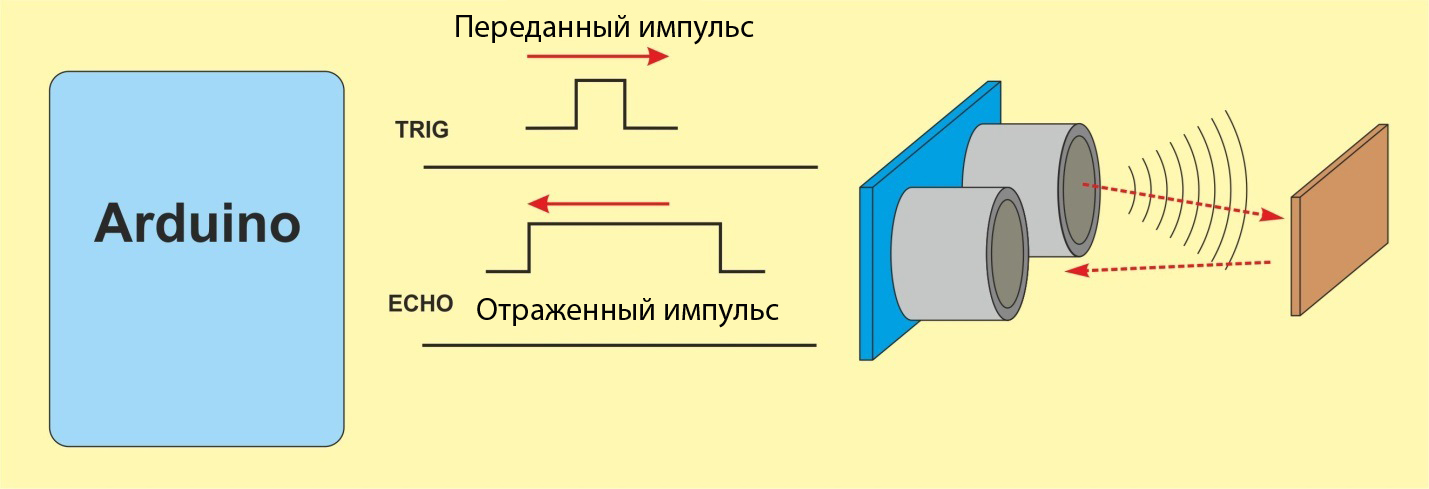
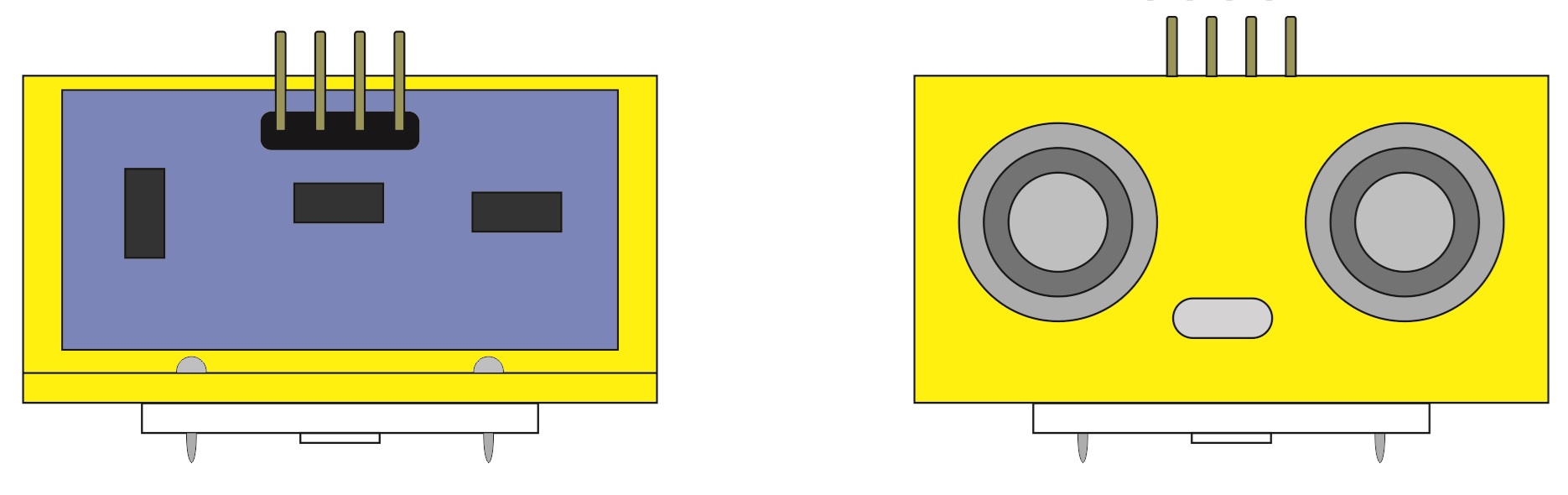
Датчик предназначен для определения расстояния до объекта бесконтактным способом. Эффективное расстояние составляет 2cm-400cm, Точность измерения расстояния в диапазоне от 2-х см до 400 см составляет 3 мм. Эффективный угол +-15 градусов.
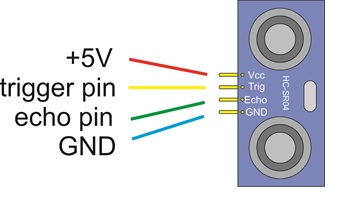
Рабочее напряжение: 5V (DC)
Максимальный ток: Не более 2mA.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
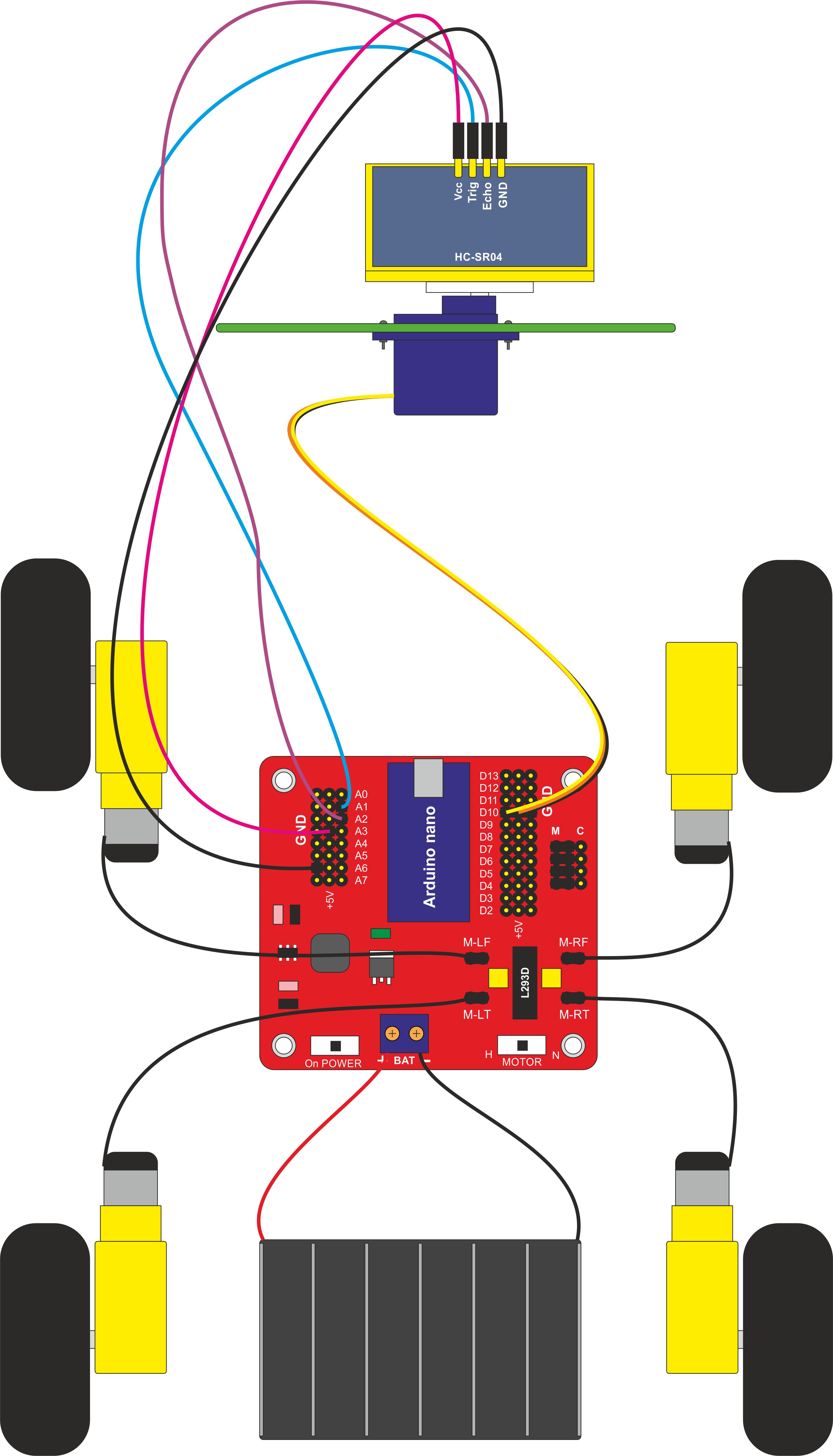
/* Экспериментируем с ультразвуковым датчиком HC-SR04. Если расстояние до препятствия меньше 50 см, то включаем светодиод на плате ардуино */ int Trig = 8; //обозначим к какой ножке и что подключаем соответствующий пин датчика int Echo = 9; int ledPin = 13; // Светодиод на плате Ардуино void setup() { pinMode(Trig, OUTPUT); pinMode(Echo, INPUT); pinMode(ledPin, OUTPUT); Serial.begin(9600); //Инициализируем сериал порт для вывода полученных данных } unsigned int time_us=0; //Переменная для хранения временного интервала unsigned int distance_sm=0; // Переменная для хранения расстояния в сантиметрах void loop() { digitalWrite(Trig, HIGH); // Подаем сигнал на выход микроконтроллера delayMicroseconds(10); // Удерживаем 10 микросекунд digitalWrite(Trig, LOW); // выключаем импульс time_us=pulseIn(Echo, HIGH); // Замеряем длину принятого импульса distance_sm=time_us/58; // Пересчитываем в сантиметры Serial.println(distance_sm); // Выводим в порт if (distance_sm<50) // Если расстояние менее 50 сантиметром { digitalWrite(ledPin, HIGH); // Включаем светодиод } else { digitalWrite(ledPin, LOW); // Иначе выключаем } delay(100); } |

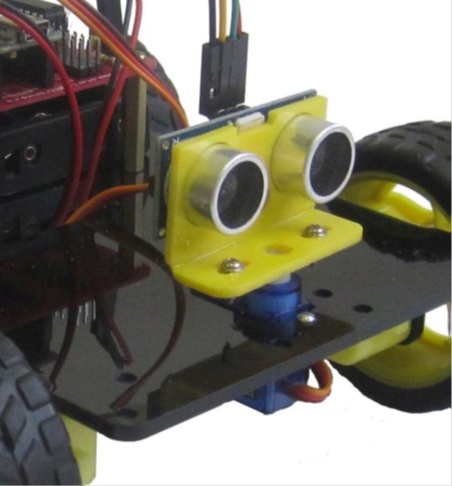
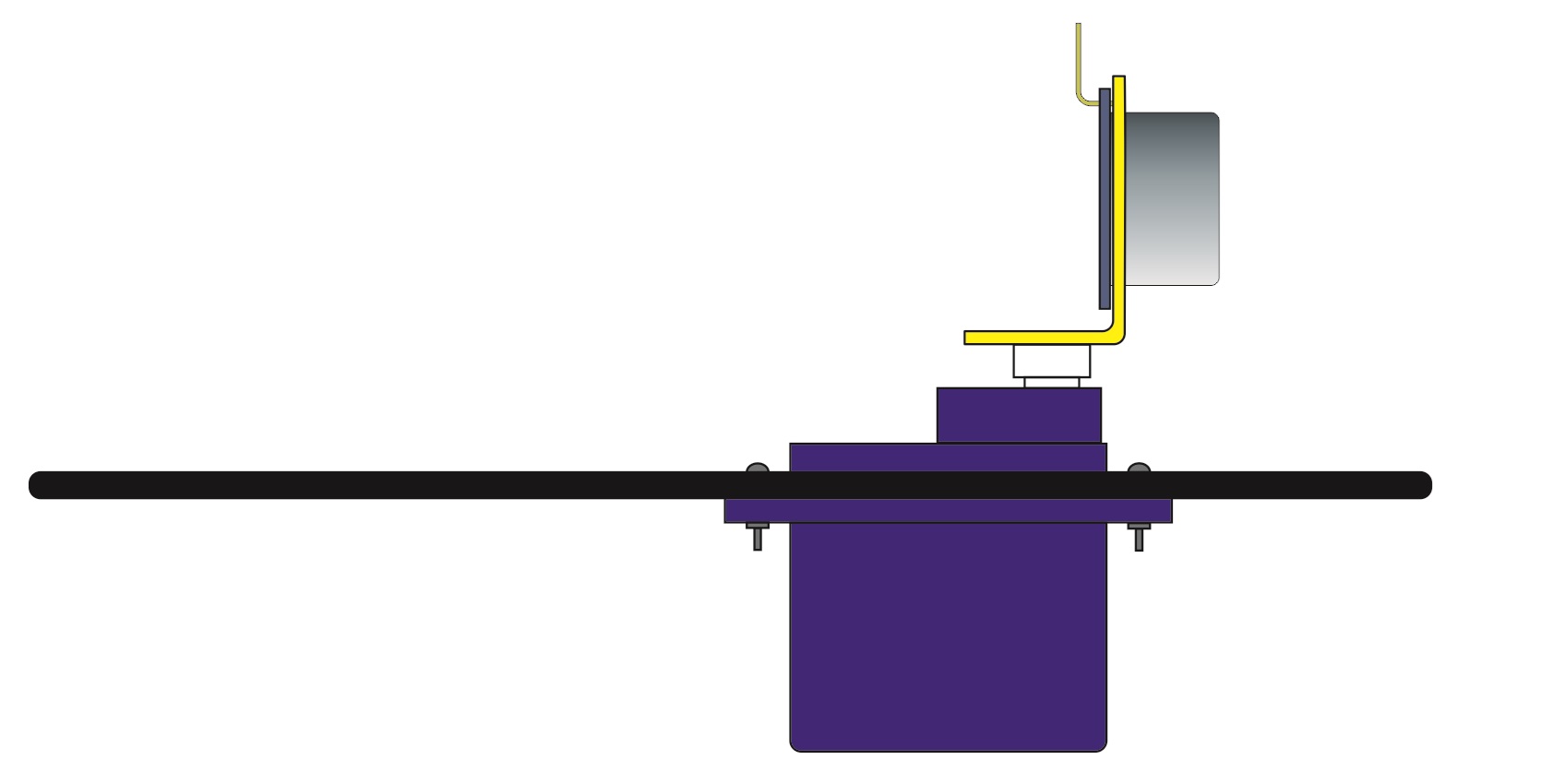
Прикручиваем двумя к желтому пластиковому держателя саморезами из комплекта сервомотора двухплечное коромысло. Вставляем в отверстия датчик и устанавливаем собранную конструкцию на ось сервомотора.
Копируем и загружаем код.
Обратите внимание, что для работы этой программ необходимы две библиотеки
Библиотека Servo.h присутствует в стандратном пакете Ардуино.
Библиотеку NewPing.h можно скачать здесь.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 |
#include |
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 ESP32 проекты
ESP32 проекты
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Радиореле для дистанционного управления электроприборами
Радиореле для дистанционного управления электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.
 Электронные компоненты
Электронные компоненты
 Модули для БПЛА
Модули для БПЛА







