Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
Перед тем, как начать работу с датчиками попробуем просто научить нашего робота двигаться.
Первый эксперимент проведем с простой программой. Попеременное движение робота вперед и назад.
В гнезда блока управления R-5 устанавливается контроллер Arduino nano. Поэтому и в настройках среды разработки Arduino IDE необходимо выбрать именно этот контроллер с процессором ATmega328.
Так же надо не забыть в среде Arduino IDE выбрать СОМ порт.
Теперь уже приступаем непосредственно к программированию.
Программа для контроллера Ардуино обычно состоит из 3-х частей.
В первой части, как в обычной математической задаче описываются исходные данные. Мы присваиваем названия, назначение, функционал контактов контроллера. Записываем, какие библиотеки мы будем использовать в ходе выполнения программы.
Во второй части с названием Setup пишем уже непосредственно код программы. Но этот код исполняется только один раз за время работы программы. Это необходимо для того, что бы запрограммировать выходы, входы контроллера на все время действия программы
И третья часть программы loop представляет собой команды, которые исполняются процессором в течение всего периода работы процессора.
Рассмотрим простой пример кода для движения робота.
В первой части кода мы определяем, какими контактами платы Ардуино мы будем управлять драйвером и соответственно электромоторами, придумаем название команд, что бы нам было понятно их назначение.
В блоке R-5 контакты Ардуино для управления электоромоторами жестко подключены к входам драйвера.
Давайте посмотрим на рисунок ниже:
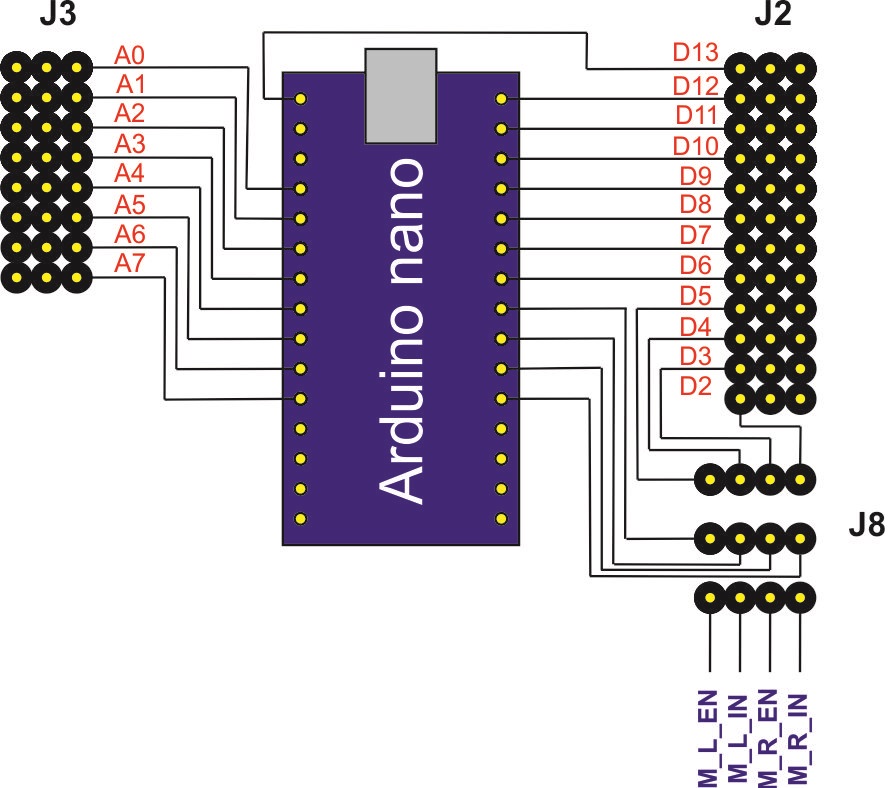
Назначение входов драйвера электромоторов.
M_R_IN – вход драйвера, управляющий направлением вращения правого электромотора. Высокий уровень (HIGHT) – вращение вперед.
M_R_EN – вход драйвера, разрешающий вращение правого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
M_L_IN – вход драйвера, управляющий направлением вращения левого электромотора. Высокий уровень (HIGHT) – вращение вперед.
M_L_EN – вход драйвера, разрешающий вращение левого электромотора. Высокий уровень (HIGHT) разрешает вращение. При подаче на вход сигнала с широтно-импульсной модуляцией (ШИМ, PWM) вход управляет скоростью вращения.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |
#define DIR_R 2 // управлять направлением вращения правого мотора будем с контакта 2 #define SPEED_R 3 // управлять разрешением вращения и скоростью вращения правого //мотора будем с контакта 3 #define DIR_L 4 //управлять направлением вращения левого мотора будем с контакта 4 #define SPEED_L 5 // управлять разрешением вращения и скоростью вращения левого //мотора будем с контакта 5 //В этой части кода больше не будем задавать ни каких параметров // приступаем ко второй части программы. Мы знаем, что в этой части кода команды //исполняются только один раз void setup() { pinMode (DIR_R, OUTPUT); // Драйвер управляется выходными сигналами с Ардуино. //Поэтому мы определяем все контакты , как OUTPUT pinMode (SPEED_R, OUTPUT); pinMode (DIR_L, OUTPUT); pinMode (SPEED_L, OUTPUT); } // И в третьей части кода мы уже пишем алгоритм работы. Т.е. то, что наш робот долженвыполнять void loop() { digitalWrite (DIR_R, HIGH); // Команда digitalWrite устанавливает на контакте 2 высокий //уровень. Для драйвера моторов это означает то, что мотор будет вращаться вперед digitalWrite (SPEED_R, HIGH); // высокий уровень на контакте 3 разрешает драйверу //вращать электромотор digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, LOW); // Низкий уровень запрещает вращение моторов digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, LOW); |
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 ESP32 проекты
ESP32 проекты
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 FPV дроны
FPV дроны
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.
 Электронные компоненты
Электронные компоненты
 Модули для БПЛА
Модули для БПЛА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Радиореле для дистанционного управления электроприборами
Радиореле для дистанционного управления электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные







