Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
#define DIR_R 2 #define SPEED_R 3 #define DIR_L 4 #define SPEED_L 5 void setup() { pinMode (DIR_R, OUTPUT); pinMode (SPEED_R, OUTPUT); pinMode (DIR_L, OUTPUT); pinMode (SPEED_L, OUTPUT); } void loop() { digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, LOW); // Низкий уровень запрещает вращение моторов digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, LOW); delay(2000); //останов 2 сек. //далее левое колесо вращаем 1 сек., правое колесо остановлено //после поворота направо робот сразу начинает движение вперед без паузы. digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, LOW); delay(1000); // Вращаем 1 сек //вращаем оба колеса 1 сек. digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек //вращаем правое колесо 1 сек., левое колесо остановлено digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, LOW); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек. } |
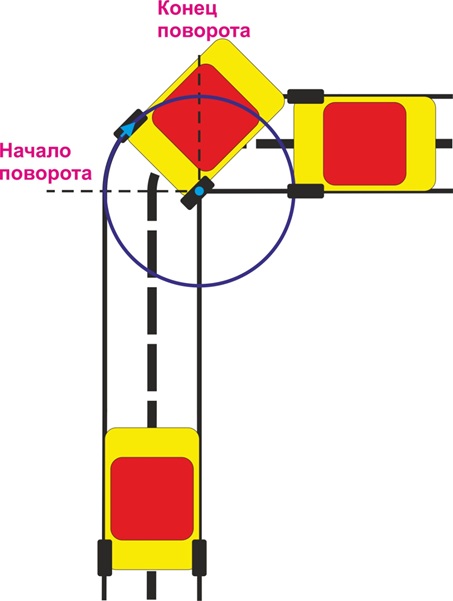
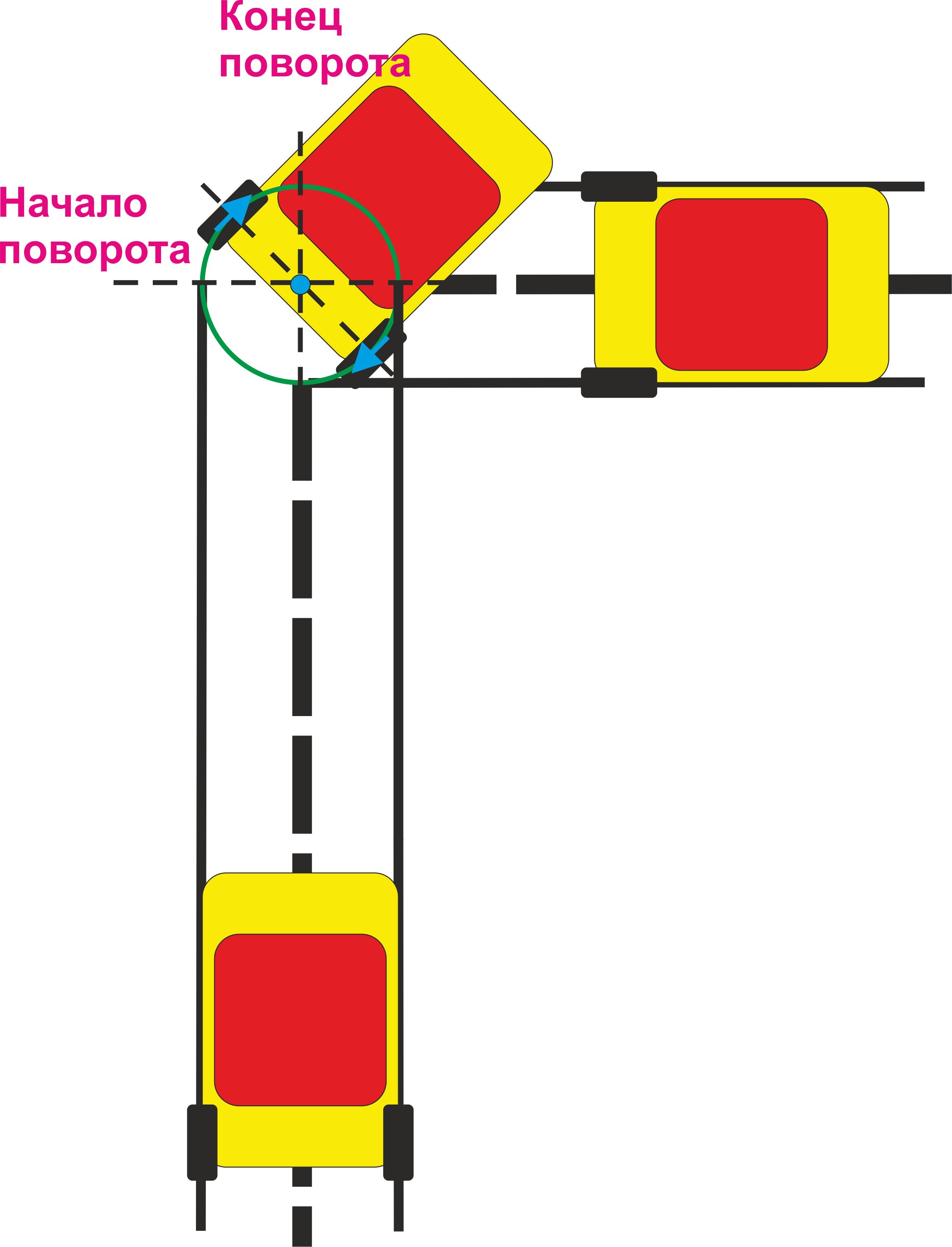
Вариант поворота №2
Во втором варианте для поворота мы будем вращать колеса в разные стороны. В этом случае значительно уменьшается радиус поворота. Робот разворачивается практически вокруг своей оси.
На рисунке видно, что радиус разворота равен половине расстояния между серединами колес.
Таким образом мы сможем посчитать время для поворота.
Половина расстояния между серединами колес (радиус поворота) –
Длина окружности поворота –
Четверть длины окружности –
Время прохождения участка поворота при средней измеренной скорости –
Пишем код.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
#define DIR_R 2 #define SPEED_R 3 #define DIR_L 4 #define SPEED_L 5 void setup() { pinMode (DIR_R, OUTPUT); pinMode (SPEED_R, OUTPUT); pinMode (DIR_L, OUTPUT); pinMode (SPEED_L, OUTPUT); } void loop() { digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, LOW); // Низкий уровень запрещает вращение моторов digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, LOW); delay(2000); //останов 2 сек. //далее левое колесо вращаем 1 сек. вперед, правое колесо вращаем назад //после поворота направо робот сразу начинает движение вперед без паузы. digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, LOW); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек //вращаем оба колеса 1 сек. digitalWrite (DIR_R, HIGH); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек //вращаем правое колесо 1 сек. назад, левое колесо вращаем вперед digitalWrite (DIR_R, LOW); digitalWrite (SPEED_R, HIGH); digitalWrite (DIR_L, HIGH); digitalWrite (SPEED_L, HIGH); delay(1000); // Вращаем 1 сек } |
Скопируйте текст программы и вставьте его в Arduino IDE.
После проверки загрузите код в контроллер. Установите контроллер в блок R-5 и включите питание робота.
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 ESP32 проекты
ESP32 проекты
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 FPV дроны
FPV дроны
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.
 Электронные компоненты
Электронные компоненты
 Модули для БПЛА
Модули для БПЛА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Радиореле для дистанционного управления электроприборами
Радиореле для дистанционного управления электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные







