Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
Крепежные элементы, которые нам понадобятся.

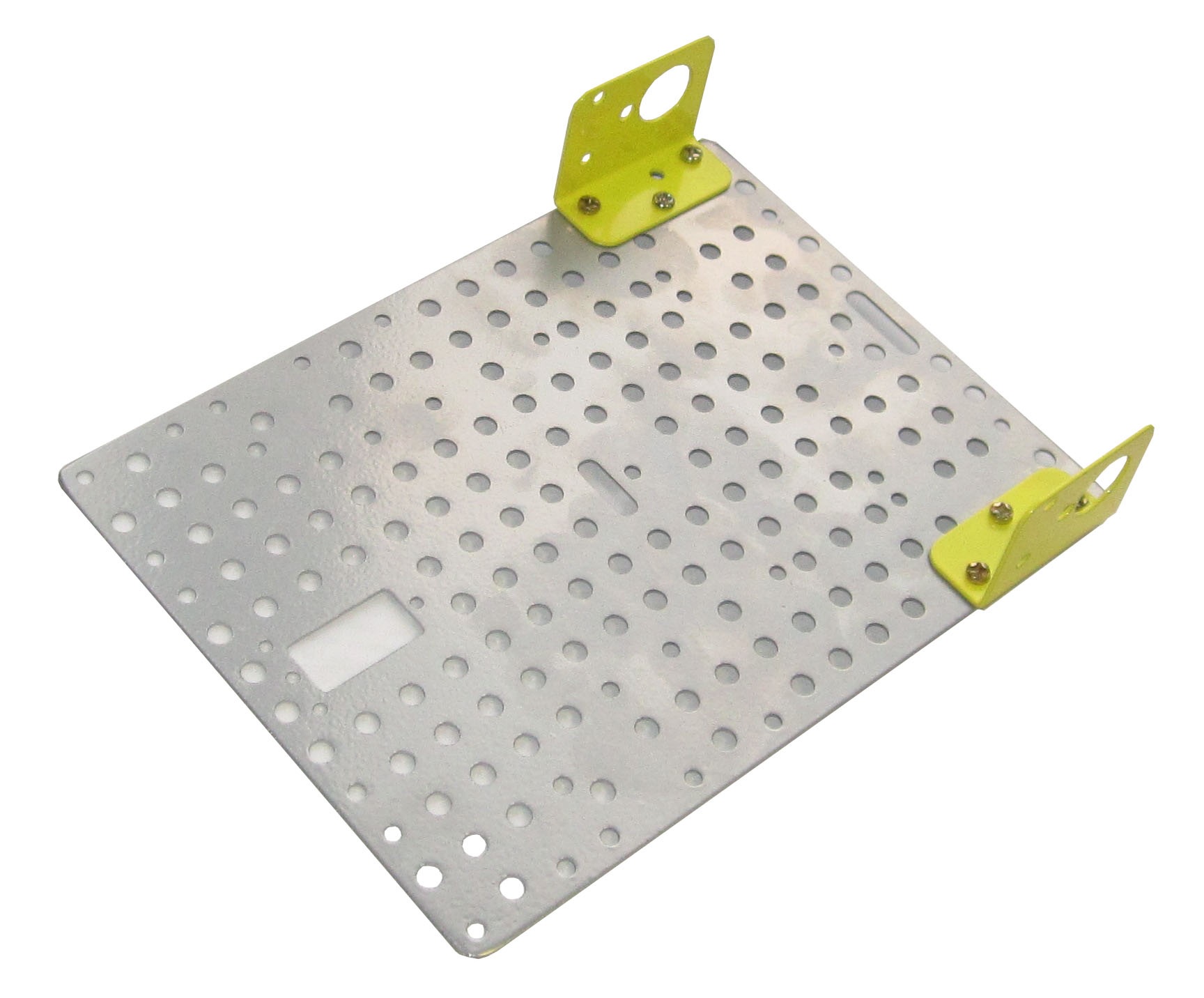
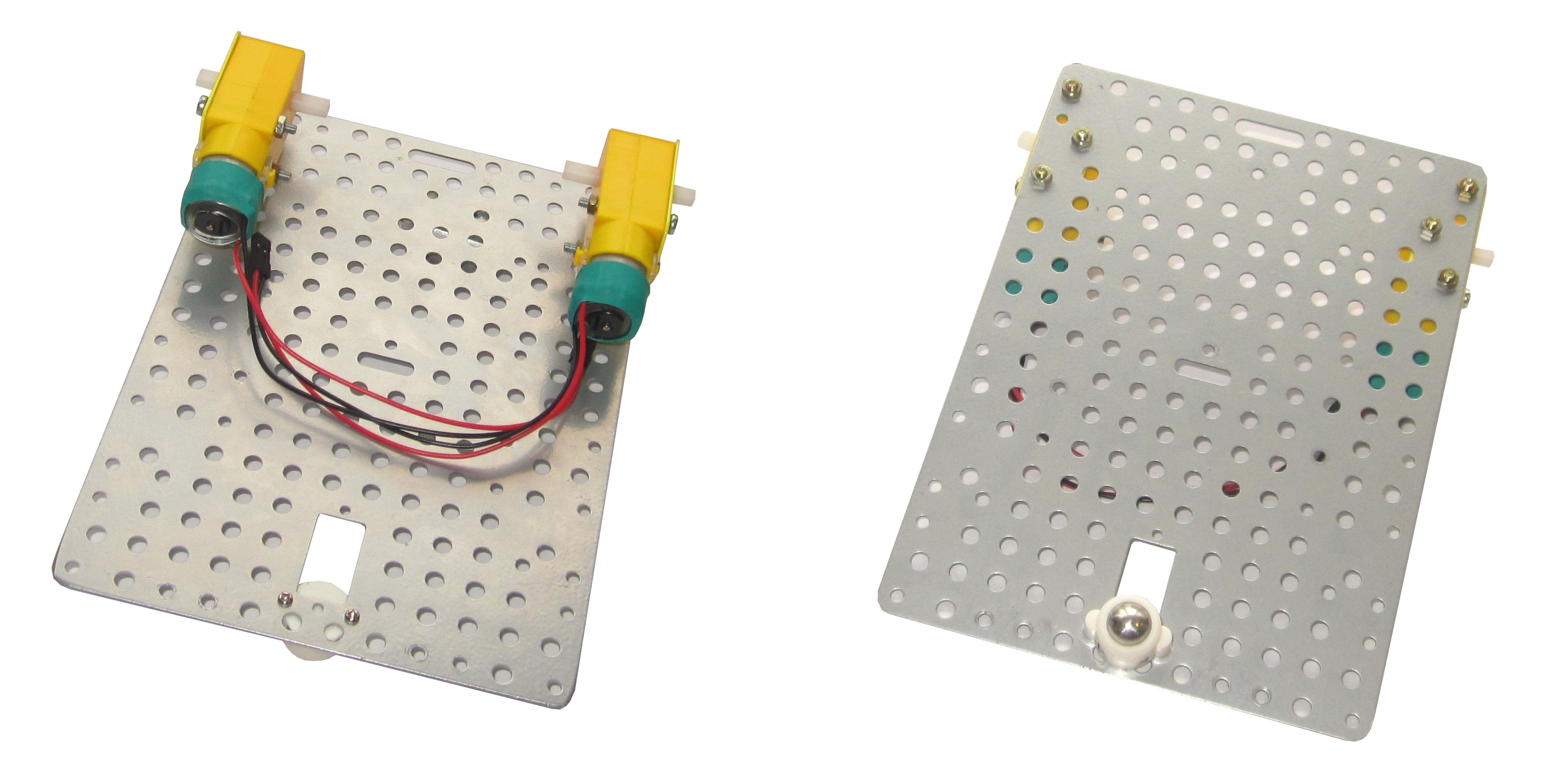
Сборку робота удобнее всего начинать с установки креплений электромоторов.
Металлические уголки крепятся к несущей пластике винтами М3 х 6 мм и гайкой М3. Уголки двух типов. Обратите внимание на правильность выбора и установки.
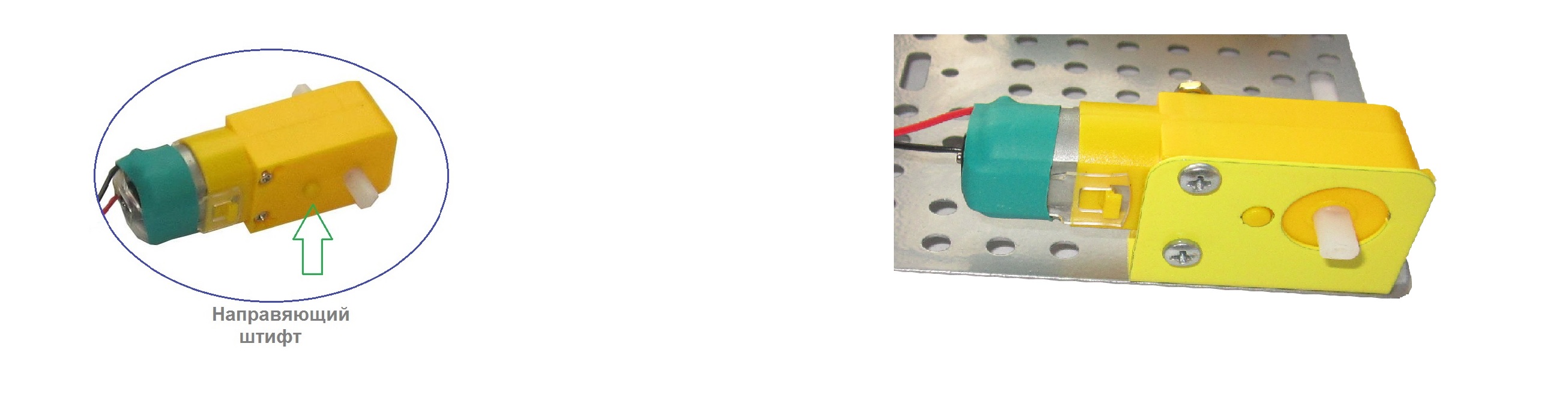
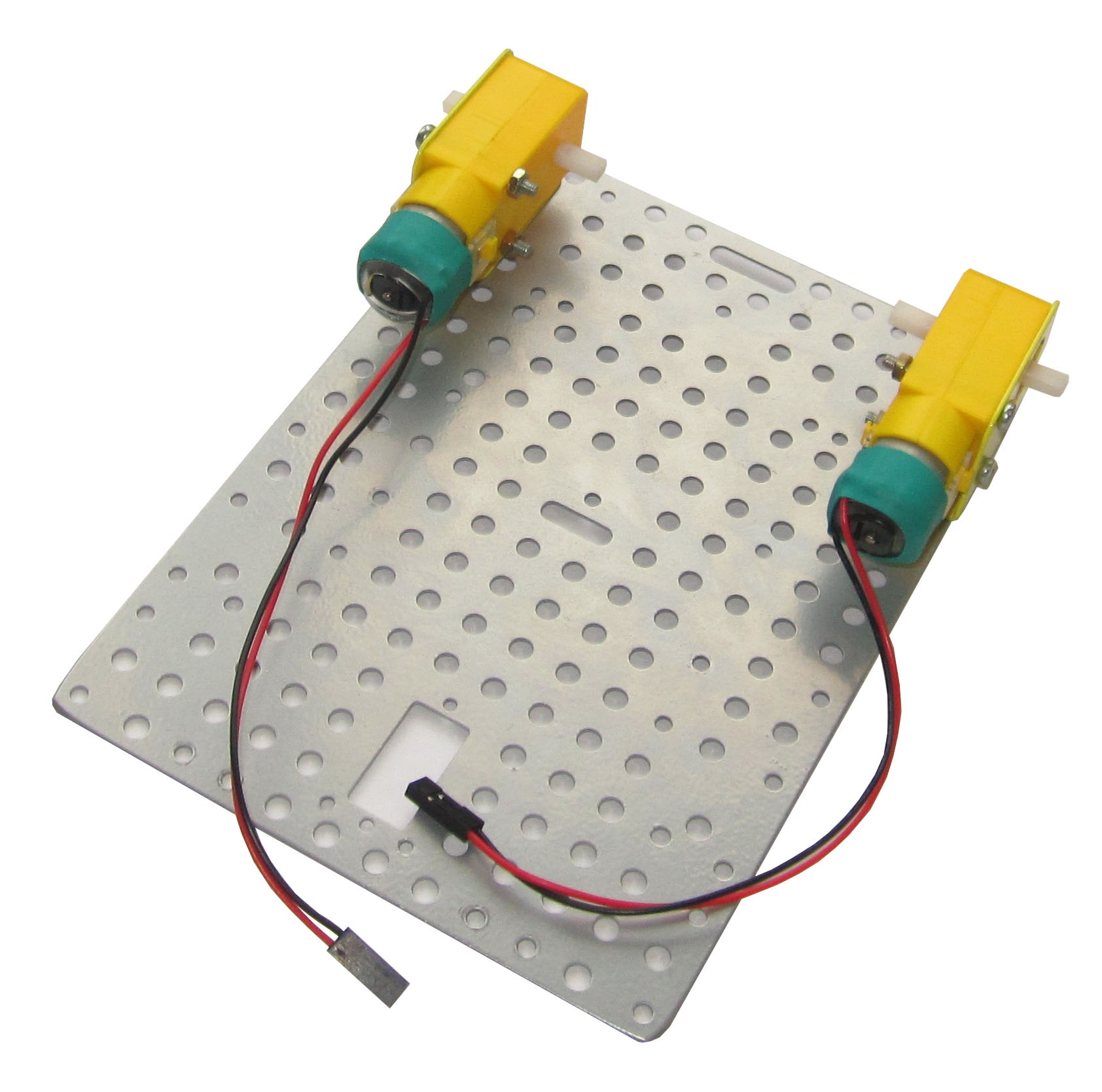
Далее так же винтами М3 х 25 и гайками М3 закрепляем моторы.
Моторы устанавливаем в крепежные уголки так, что бы направляющие штифты попали в соответствующее отверстие уголка.
Затем саморезами закрепляем шариковую опору. Шариковая опора выполняет роль опорного колеса. Для этого саморезы выкручиваем из шариковой опоры. И закручиваем обратно, но уже через несущую пластину шасси.
Разбор шариковой опоры производите очень аккуратно. Внутри расположено 5 металлических шариков. Они могут рассыпаться.
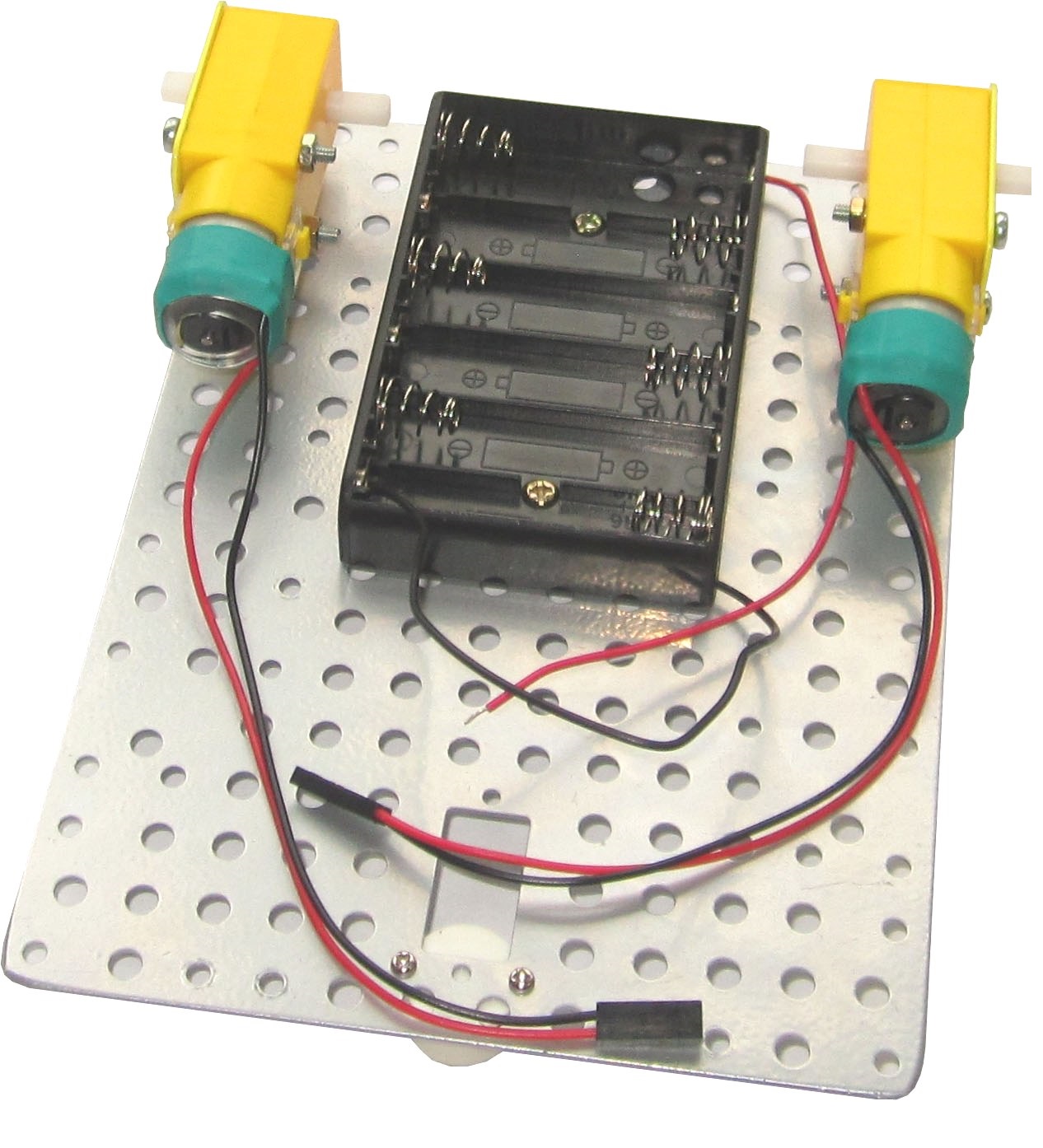
Крепим батарейный отсек винтами М3 х 6 и гайками М3
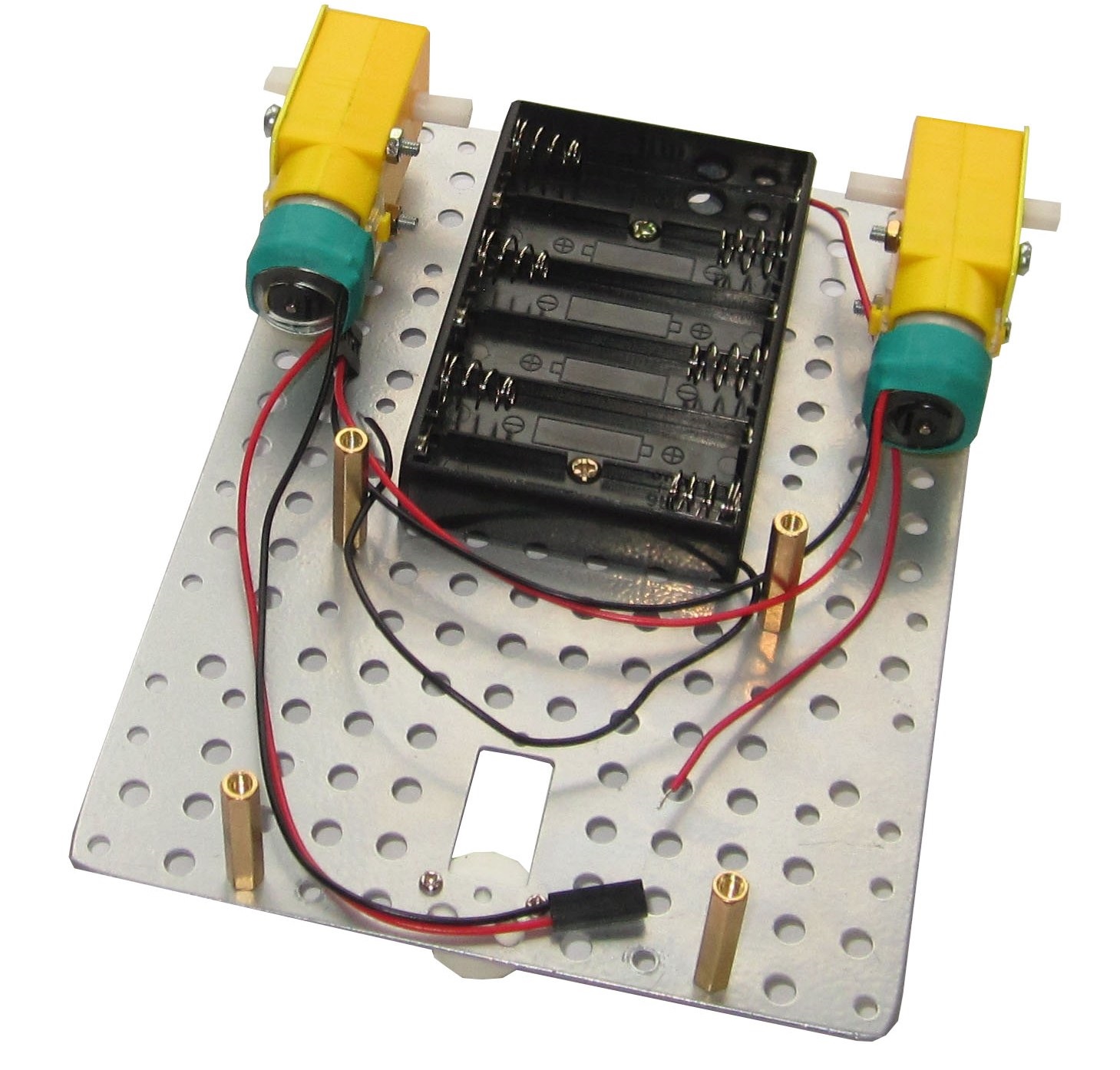
Следующим шагом устанавливаем металлические шестигранные стойки 25 мм. Стойки крепятся к несущей пластине через отверстия диаметром 3,5мм винтами М3 х 6.
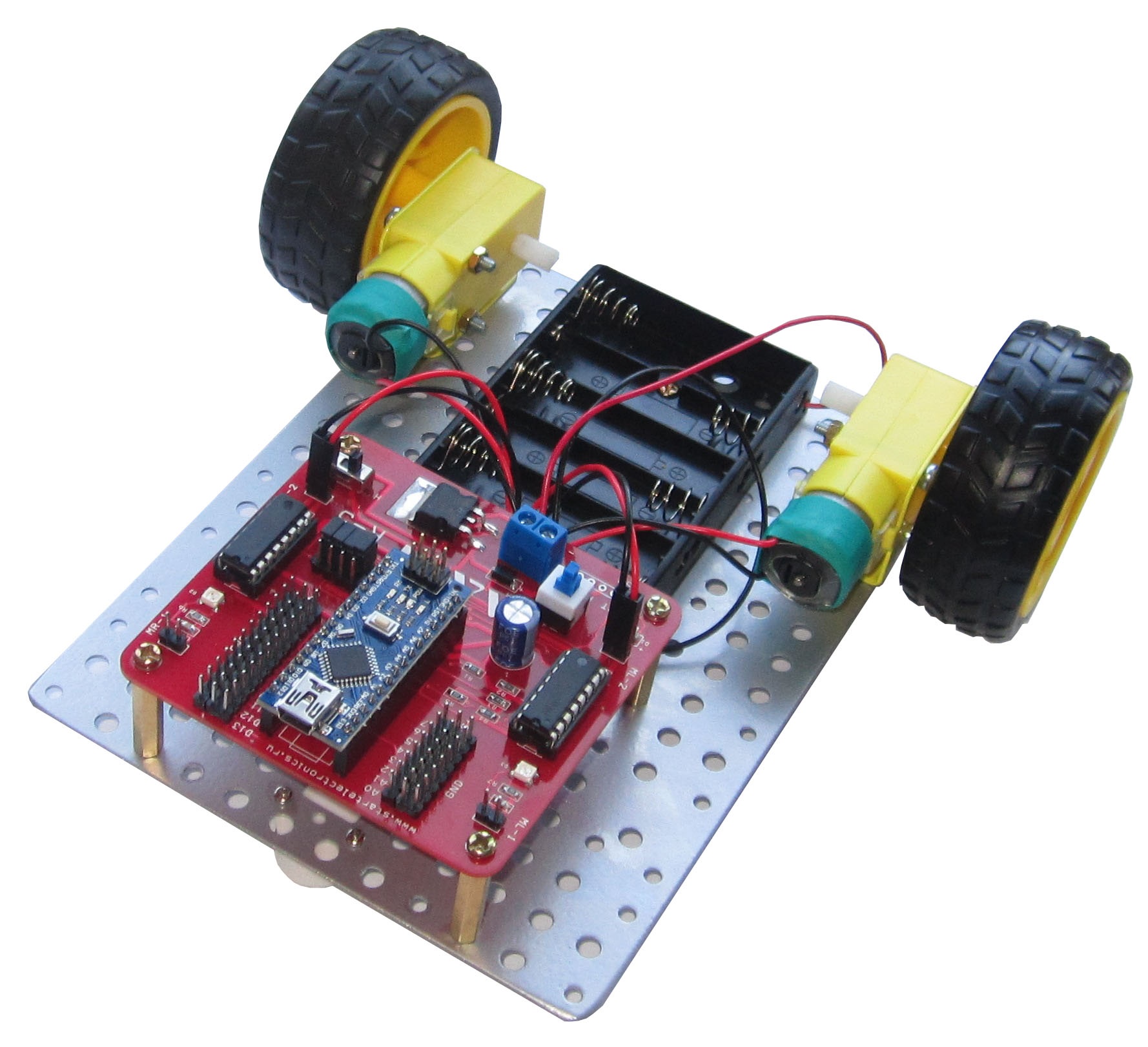
Устанавливаем в колодки блока управления R-5 модуль Ардуино нано и крепим на стойки

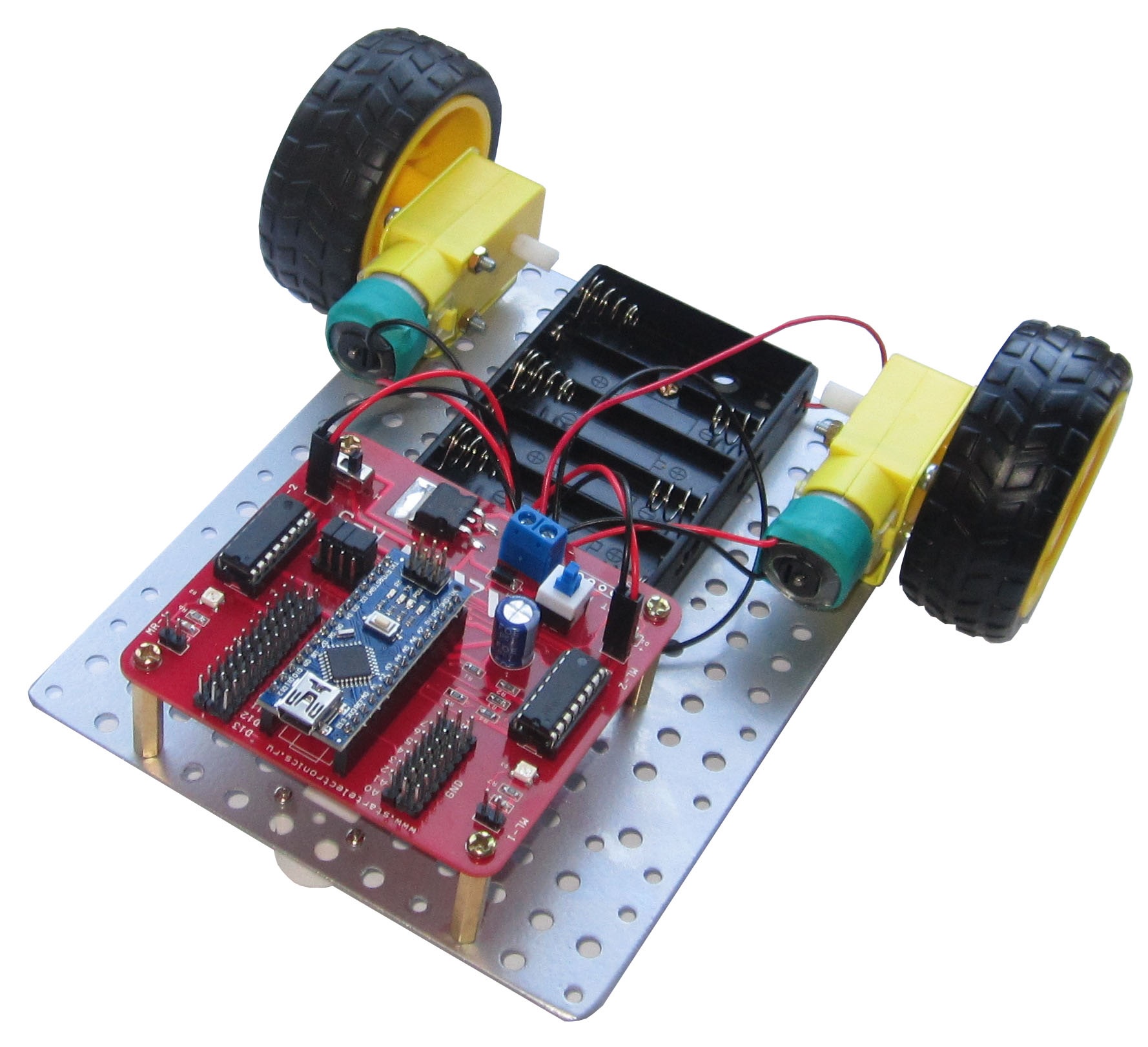
Ну и устанавливаем на полуоси моторов колеса.
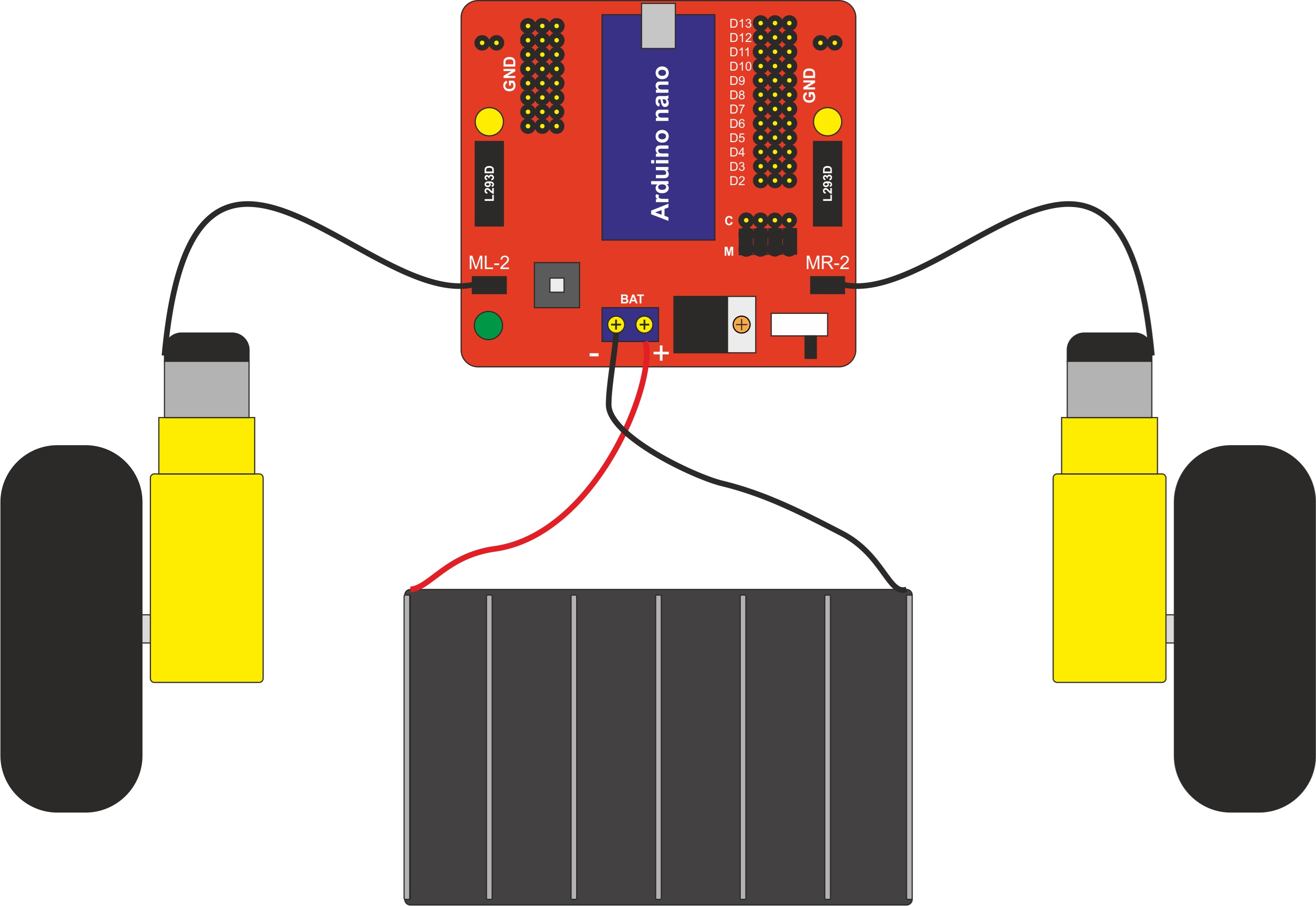
Подключаем к клеммам питания батарейный отсек. Черный провод к « - »,
красный провод к « + ».
Провод левого мотора подключаем к любому разъему ML, провод правого мотора подключаем к любому разъему MR.
Наш робот готов к экспериментам.
Первые опыты мы будем проводить без применения датчиков.
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Радиореле большой дальности для управления электроприборами удаленных объектов
Радиореле большой дальности для управления электроприборами удаленных объектов
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.







