Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
Движение робота по линии - самый популярный эксперимент начинающего роботостроителя.
Для того, что бы наш робот мог двигаться по полю с черной линией нам необходимы уже датчики, которые смогли бы различать белое и черное поля. Эти датчики называются датчиками линии. В их задачу входит определять наличие белого или черного поля и сообщать об этом контроллеру.
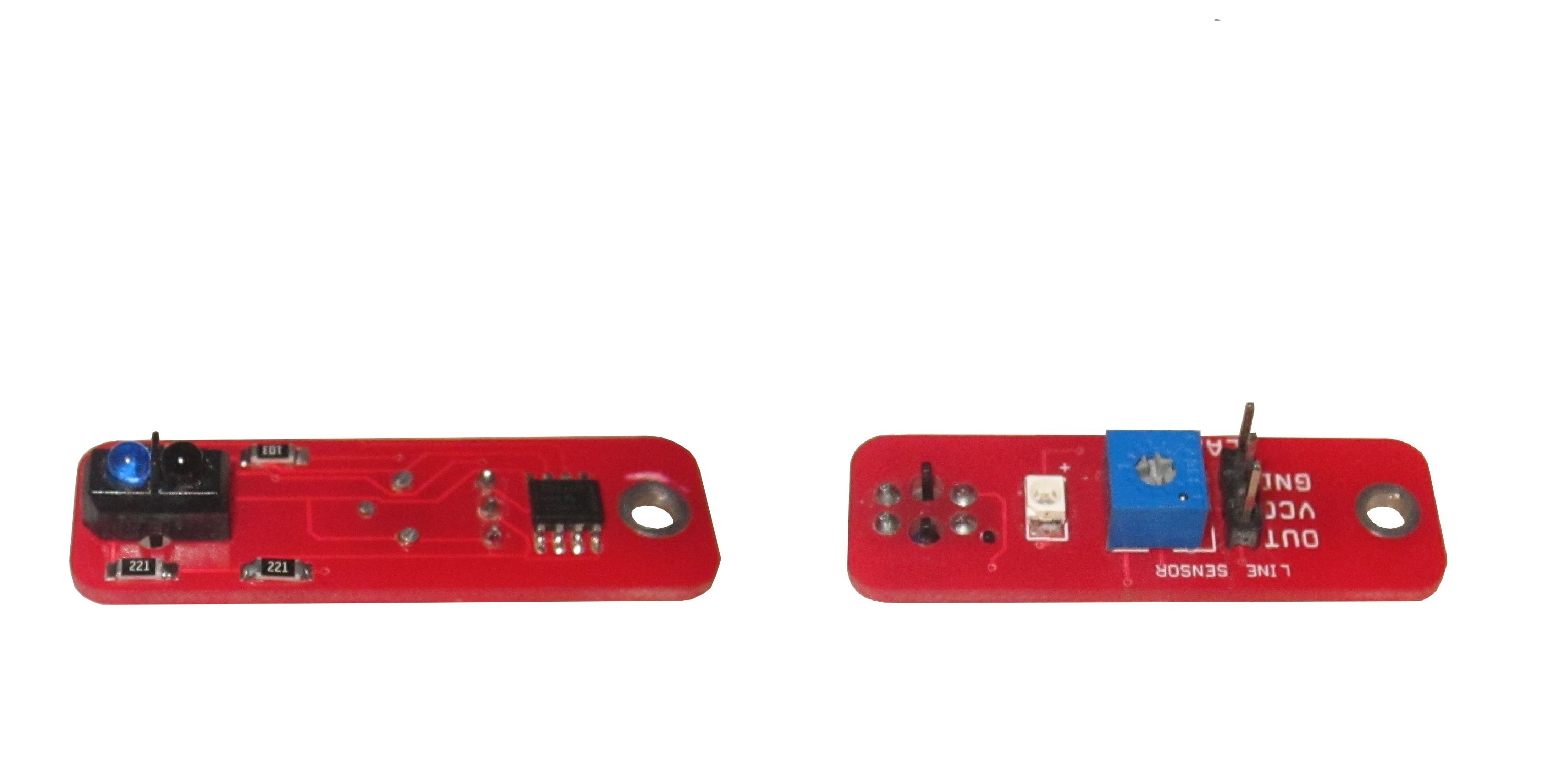
Внешний вид датчика
Принцип работы датчиков
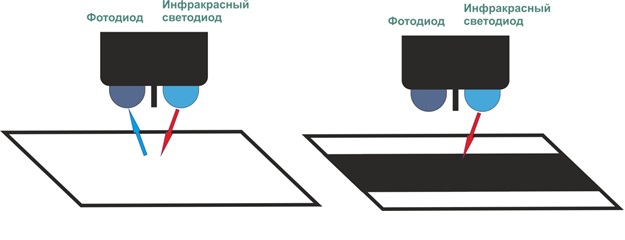
Для определения белого или черного поля используется электронный компонент, состоящий из инфракрасного светодиода(ИК) и инфракрасного фотодиода. ИК светодиод излучает свет в инфракрасном диапазоне с длиной волны порядка 940 нанометра. Такой диапазон света используется для защиты от помех, создаваемых осветительными лампами, солнечным светом.
Рассмотрим два варианта возможных событий.
Как мы знаем их физики, черное поле поглащает свет. Отражения не происходит. Такое состояние датчика контроллером воспринимается, как наличие черного поля.
На выходе фотодиода формируется хаотичный аналоговый сигнал. Для повышения помехозащищенности в схему датчика включен компаратор, который отсеивает помехи, ложные отражения и др. Порог срабатывания компаратора устанавливается резистором R1. С выхода компаратора мы получаем сигнал в цифровом виде.

Подключение датчиков
Устанавливаем датчики линии и подключаем их к блоку управления R-5. Контакты GND на датчиках соединяем проводками с контактами GND на блоке R-5( в разъеме J3 правый ряд контактов). Контакт VCC на датчиках соединяем с контактами +5V на блоке R-5 ( средний ряд контактов). Контакты OUT левого и правого датчиков подключаем к контактам разъема J3. К каким контактам подключим выходы датчиков, такие и надо будет нам указывать в нашей программе.
Помним, что контакты D2-D5 у нас заняты уже драйвером моторов.
Подключим датчики следующим образом.
Левый датчик – D6
Правый датчик – D7
Пишем код.
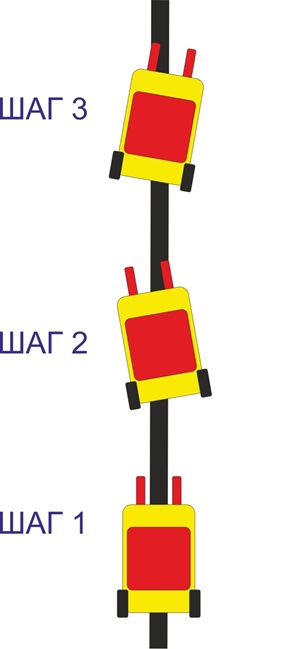
Перед написанием кода рассмотрим на рисунке ситуации, которые могут возникать при движении робота.
ШАГ1. Датчики робота «видят» белое поле. Контроллер принимает решение включить оба мотора и двигаться прямо.
ШАГ2. Робот правым датчиком наезжает на черную линию. Для выравнивания положения необходимо притормозить правое колесо.
ШАГ3. Робот наезжает левым датчиком на черную линию. Для выравнивания положения необходимо притормозить вращение левого колеса.
В этом эксперименте поворот в сторону линии сделаем следующим образом.
При наезде правым датчиком на черную линию мы останавливаем правый мотор. Выравнивание хода осуществляется левым мотором.
При наезде левым датчиком на черную линию мы останавливаем левый мотор
Выравнивание хода осуществляется правым мотором.
Если оба датчика оказываются над черной линией, то робот продолжает движение в прямом направлении
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 |
#define LS 6 // левый датчик #define RS 7 // правый датчик #define DIR_R 2 #define SPEED_R 3 #define DIR_L 4 #define SPEED_L 5 void setup() { pinMode(LS, INPUT); pinMode(RS, INPUT); pinMode(DIR_R , OUTPUT); pinMode(SPEED_R , OUTPUT); pinMode(DIR_L , OUTPUT); pinMode(SPEED_L, OUTPUT); } void loop() { if(digitalRead(LS==HIGH) && digitalRead(RS==HIGH)) // движение вперед { digitalWrite(DIR_R , HIGH); digitalWrite(SPEED_R ,HIGH); digitalWrite(DIR_L , HIGH); digitalWrite(SPEED_L ,HIGH); } if((digitalRead(LS==LOW)) && digitalRead(RS==HIGH)) // вправо { digitalWrite(DIR_R , HIGH); digitalWrite(SPEED_R ,LOW); digitalWrite(DIR_L , HIGH); digitalWrite(SPEED_L ,HIGH); } if(digitalRead(LS==HIGH) && (digitalRead(RS==LOW)) // влево { digitalWrite(DIR_R , HIGH); digitalWrite(SPEED_R ,HIGH); digitalWrite(DIR_L , HIGH); digitalWrite(SPEED_L ,LOW); } if(digitalRead(LS==LOW) && (digitalRead(RS==LOW)) // остановка { digitalWrite(DIR_R , HIGH); digitalWrite(SPEED_R ,HIGH); digitalWrite(DIR_L , HIGH); digitalWrite(SPEED_L ,HIGH); } } |
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 ESP32 проекты
ESP32 проекты
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Радиореле для дистанционного управления электроприборами
Радиореле для дистанционного управления электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.
 Электронные компоненты
Электронные компоненты
 Модули для БПЛА
Модули для БПЛА







