Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 |
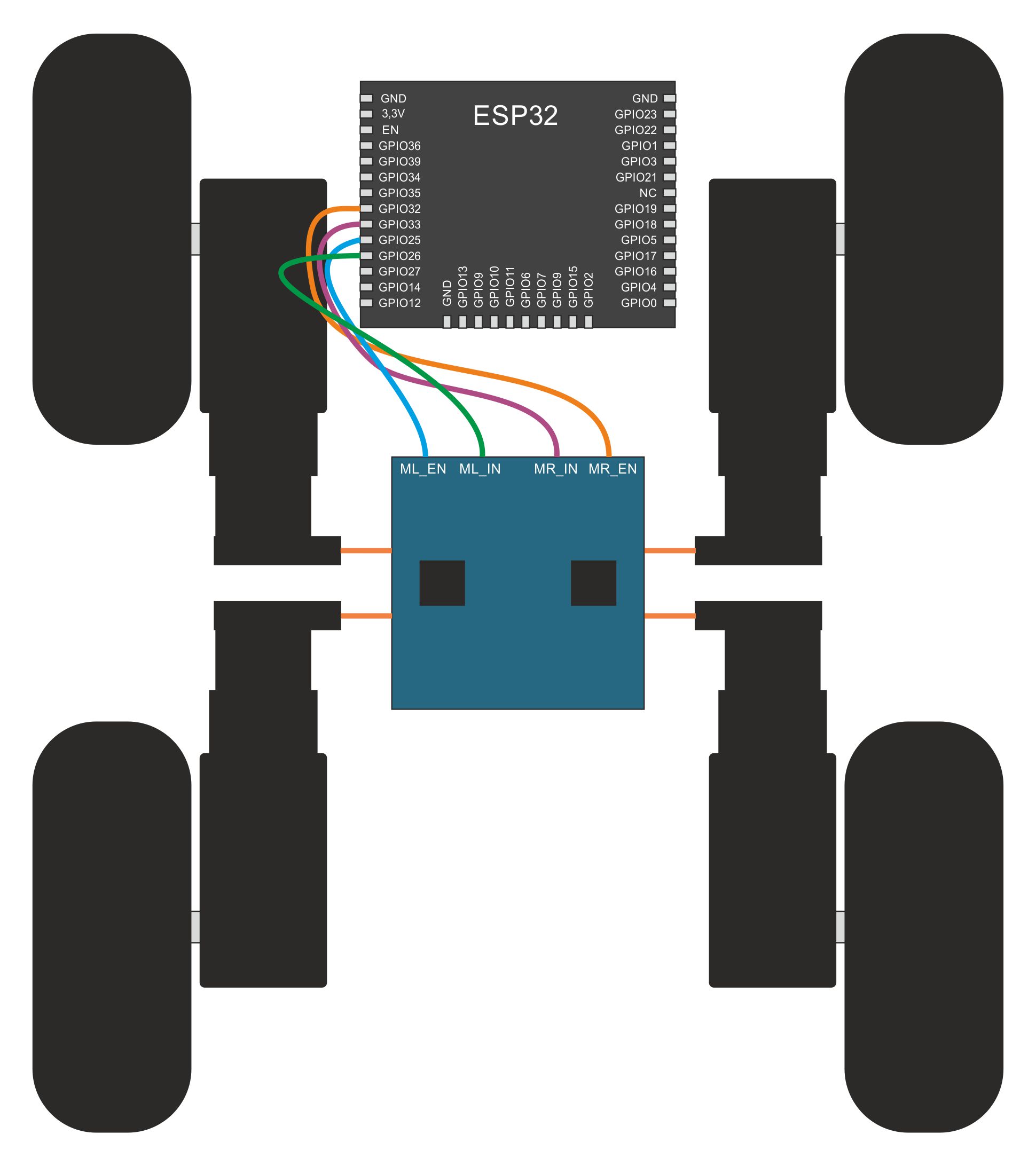
//******************************************************************** /* Проверяем работу электронных компонентов робота. Робот движется вперед, назад, влево, вправо, останов. */ // По схеме определяем, к каким пинам подключен драйвер моторов #define ML_IN 26 //пин, отвечающий за направление вращения левого мотора #define ML_EN 25 //пин, отвечающий за разрешение вращения. #define MR_IN 33 //направления вращения правого мотора #define MR_EN 32 // пин, отвечающий за разрешение вращения. { pinMode(MR_IN,OUTPUT); pinMode(ML_IN,OUTPUT); pinMode(MR_EN,OUTPUT); pinMode(ML_IN,OUTPUT); } void loop() { //движение вперед digitalWrite(ML_IN,HIGH); digitalWrite(MR_IN,HIGH); digitalWrite(MR_EN,HIGH); digitalWrite(ML_EN,HIGH); delay(2000); //движение назад digitalWrite(ML_EN,HIGH); digitalWrite(ML_IN,LOW); digitalWrite(MR_EN,HIGH); digitalWrite(ML_IN,LOW); delay(2000); //движение влево digitalWrite(ML_EN,HIGH); digitalWrite(ML_IN,LOW); digitalWrite(MR_EN,HIGH); digitalWrite(MR_IN,HIGH); delay(2000); //движение вправо digitalWrite(ML_EN,HIGH); digitalWrite(ML_IN,HIGH); digitalWrite(MR_IN,LOW); digitalWrite(ML_EN,HIGH); delay(2000); //Остановка digitalWrite(ML_EN,LOW); digitalWrite(ML_IN,HIGH); digitalWrite(MR_EN,LOW); digitalWrite(MR_IN,HIGH); delay(2000); } //************************************************** |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 |
//******************************************************************** /* Следующий эксперимент. Проверяем работу электронных компонентов робота. Робот движется вперед, назад, влево, вправо с изменением скорости */ // По схеме определяем, к каким пинам подключен драйвер моторов #define ML_IN 26 //пин, отвечающий за направление вращения левого мотора #define ML_EN 25 //пин, отвечающий за скорость вращения. ШИМ #define MR_IN 33 //направления вращения правого мотора #define MR_EN 32 //скорость вращения правого мотора void setup() { /* В ESP32 для задания параметров ШИМ необходимо предварительно задать Номер канала ШИМ, частоту и разрешение. Эти параметры мы устанавливаем в следующие функции. ledcSetup(channel, frequency, resolution) ledcAttachPin(gpio, channel) 0 - номер канала 1200 частота 8 - разрешение. Значение 8 позволяет нам задать значение ШИМ в пределах 0-255 */ pinMode(ML_IN,OUTPUT); //устанавливаем пин направления как OUTPUT ledcSetup(0, 1200, 8); //Задаем параметры для первого канала ШИМ ledcAttachPin(25, 0); //пин 25 подключен к первому ШИМ каналу. pinMode(MR_IN,OUTPUT); // устанавливаем пин направления как OUTPUT ledcSetup(1, 1200, 8); //Задаем параметры для первого канала ШИМ ledcAttachPin(32, 1); //пин 32 подключен ко второму ШИМ каналу. } void loop() { //движение вперед digitalWrite(ML_IN,HIGH); ledcWrite(0, 255); // Первый канал. Значение 255 ШИМ digitalWrite(MR_IN, HIGH); ledcWrite(1, 255); // Второй канал. Значение 255 ШИМ delay(2000); //движение назад digitalWrite(ML_IN,LOW); ledcWrite(0, 90); digitalWrite(MR_IN,LOW); //set control pins of the right motor to HIGH.. ledcWrite(1, 90); delay(2000); //движение влево digitalWrite(ML_IN,LOW); ledcWrite(0, 100); digitalWrite(MR_IN,HIGH); ledcWrite(1, 200); delay(2000); //движение вправо digitalWrite(ML_IN,HIGH); ledcWrite(0, 200); digitalWrite(MR_IN,LOW); ledcWrite(1, 100); delay(2000); //Остановка digitalWrite(ML_IN,LOW); ledcWrite(0, 0); digitalWrite(MR_IN,LOW); ledcWrite(1, 0); delay(2000); } //************************************************** |
Открываем среду Arduino IDE, копируем код, подключаем USB кабелем плату М1 к компьютеру, проверяем настройки, выбираем COM порт и нажимаем кнопку загрузки.
При загрузке кода обратите внимание, что после компиляции для загрузки необходимо нажать кнопку IO0 на плате М1. После загрузки для запуска программы надо нажать кнопку EN.
Отключаем робота от компьютера, включаем питание от аккумуляторов и проверяем движение робота.
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 ESP32 проекты
ESP32 проекты
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Дистанционное управление электроприборами
Дистанционное управление электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.







