Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
3-осевой акселерометр измеряет скорость изменения скорости (м / с ^ 2) или ускорение объекта. Это измерение может выполняться как для неподвижных, так и для движущихся объектов. Для стационарных объектов скорость изменения скорости равна ускорению свободного падения (9,8 м / с ^ 2) или, иначе, силе тяжести. Модуль также оснащен 3-осевым гироскопом, который измеряет скорость вращения объекта в рад/с. Эта функция помогает нам определить точную ориентацию объекта.
Основные функции модуля MPU6050
Встроенная шина I2C, которая используется для передачи данных гироскопа, акселерометра и датчика температуры на другие устройства, такие как микроконтроллеры.
Встроенный подтягивающий резистор, поэтому нам не нужно подключать внешние подтягивающие резисторы, которые необходимы для интерфейса шины I2C.
Программируемые пользователем гироскоп и акселерометр с помощью 16-битного аналого-цифрового преобразователя.
1024-байтовый буфер FIFO для высокоскоростной передачи данных на подключенный микроконтроллер, после чего он переходит в режим низкого энергопотребления.
Встроенный датчик температуры.
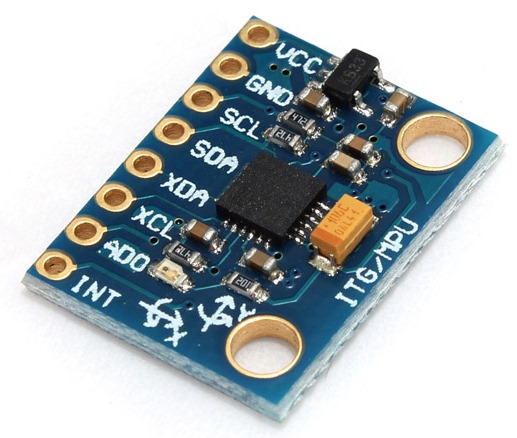
В таблице ниже приведено краткое описание каждого вывода.
| Название вывода | Описание |
| VCC | Вывод питания модуля. 3,3-5В. |
| GND | Земля. |
| SCL | Синхронизация для протокола I2C. |
| SDA | Последовательный вывод данных для протокола I2C. |
| XDA | Вспомогательный последовательный вывод данных для протокола I2C. |
| XCL | Вспомогательный последовательный вывод синхронизации для протокола I2C. |
| ADO | Вывод для выбора адреса I2C. Он используется для изменения адреса I2C. |
| INT | Вывод прерывания. Его можно использовать для определения наличия новых данных измерений. |
 Учебное оборудование
Учебное оборудование
 Наборы для робототехники
Наборы для робототехники
 Беспилотные транспортные средства
Беспилотные транспортные средства
 Цифровая лаборатория Arduino
Цифровая лаборатория Arduino
 Макетки и образовательные наборы на макетной плате
Макетки и образовательные наборы на макетной плате
 Наборы электронных компонентов. Микроэлектроника и схемотехника.
Наборы электронных компонентов. Микроэлектроника и схемотехника.
 Ардуино проекты. Эксперименты с программированием
Ардуино проекты. Эксперименты с программированием
 Макетки. Макетная плата.
Макетки. Макетная плата.
 Учебное оборудование для кабинета физики
Учебное оборудование для кабинета физики
 Arduino, драйверы, модули, Ардуино проекты
Arduino, драйверы, модули, Ардуино проекты
 Механизмы и компоненты
Механизмы и компоненты
 Электронные конструкторы с пайкой
Электронные конструкторы с пайкой
 ESP32 проекты
ESP32 проекты
 Ардуино автоматика
Ардуино автоматика
 Автоматика на Arduino
Автоматика на Arduino
 Блоки реле для ардуино
Блоки реле для ардуино
 Корпуса для РЭА
Корпуса для РЭА
 Системы безопасности и сигнализации
Системы безопасности и сигнализации
 Дистанционное управление электроприборами
Дистанционное управление электроприборами
 Извещатели охранные радиоканальные
Извещатели охранные радиоканальные
 Электронные модули и приборы
Электронные модули и приборы
 Радиомодули
Радиомодули
 PoE Ethernet
PoE Ethernet
 Встраиваемые модули
Встраиваемые модули
 Сетевые приборы
Сетевые приборы
 Светодиодные, жидкокристаллические дисплеи с Arduino.
Светодиодные, жидкокристаллические дисплеи с Arduino.







