Корзина покупок пуста.
Вы можете выбрать товар из Каталога.
Вы можете выбрать товар из Каталога.
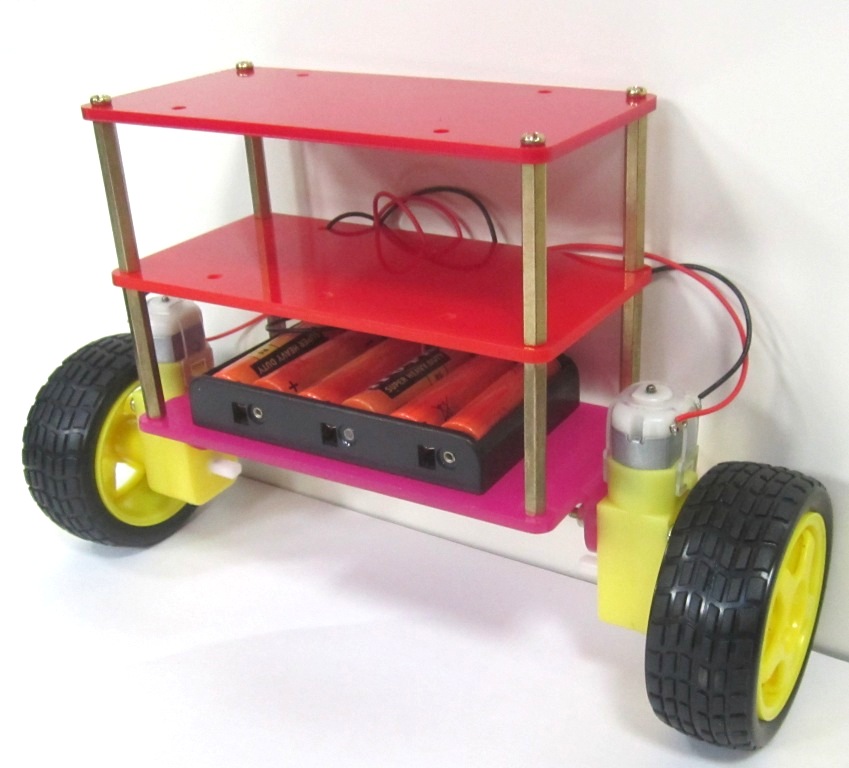
Конструктор позволяет собрать балансирующего робота. Конструктор представляет собой набор деталей шасси, ходовой части, контроллера ARDUINO, драйвера моторов. В состав конструктора входят 2 электромотора с редуктором, на выходной вал, которого устанавливаются колеса диаметром 65 мм. Количество оборотов на выходном валу редуктора при напряжении питания 6 Вольт, составляет примерно 120 оборотов в минуту. Такая скорость вращения дает возможность создавать достаточно подвижных роботов.
ПодробнееКонструктор представляет собой набор деталей шасси, ходовой части, контроллера ARDUINO, драйвера моторов.
В состав конструктора входят 2 электромотора с редуктором, на выходной вал, которого устанавливаются колеса диаметром 65 мм. Количество оборотов на выходном валу редуктора при напряжении питания 6 Вольт, составляет примерно 120 оборотов в минуту. Такая скорость вращения дает возможность создавать достаточно подвижных роботов.
Колеса обуты в полиуретановые шины, что обеспечивает очень качественное сцепление с поверхностью.
Так же входит плата управления с контроллером Ардуино Нано и гироскопом
Традиционная тележка, применяемая в различных средствах транспорта, имеет четыре колеса и центр тяжести такой тележки для повышения устойчивости располагается как можно ближе к поверхности, по которой движется эта тележка. Четыре и даже 3 колеса дают тележке полную устойчивость практически на любой поверхности. Двухколесные тележки с размещением колес, как вдоль оси движения, так и при перпендикулярном размещении колес по отношению к направлению движения, требуют
определенных усилий для поддержания равновесия. Модель двухколесного балансирующего робота нагляднее рассматривать как модель перевернутого маятника, который имеет центр тяжести выше своей точки опоры и закреплён на конце жёсткого стержня. Для того, что бы у нас была возможность удерживать вертикальное положение маятника, точка опоры должна быть подвижна относительно поверхности. Для этого точку опоры обычно закрепляют на тележке, которая может перемещаться. Удержание вертикального положения осуществляется с помощью перемещения точки опоры по горизонтали. Для реализации балансирующего робота необходимы: корпус тележки с колесами, гироскоп, акселерометр, элементы питания и микроконтроллер, который будет управлять устройством.
Перед сборкой и программированием обратите внимание на следующие технологические детали:
Чем выше центр тяжести тележки, тем проще стабилизировать систему. Поэтому самые тяжелые компоненты, а это батарейный отсек и плата управления, необходимо поместить в верхнюю часть. Гироскоп и акселерометр должны быть жестко закреплены. Так чтобы достаточно точно отслеживать положение тележки, скорость падения. Для этого необходимо припаять модуль MPU6050 к плате управления.
Платформа выполнена из ударопрочного акрилового стекла
Длина 170 мм
Ширина 120 мм
Передаточное число редуктора: 1:48.
Скорость вращения выходного вала редуктора: 120 об/мин (при напряжении питания 6V)
Напряжение питания моторов: 3 ~ 6V
Диаметр колеса 65 мм
Ширина протектора 25 мм
Изменение направления движения осуществляется по танковой схеме. Т.е. реверсом левой или правой пары колес.
В состав шасси входят 2 колеса и 2 электромотора с редуктором, платформа, батарейный отсек, дополнительная пластина, крепежные элементы.

| Пластина акриловая TOP | 1 |
| Пластина акриловая MIDLE | 1 |
| Пластина акриловая MOTOR | 1 |
| Стойка металлическая М-П 40 мм | 4 |
| Стойка металлическая М-М 40 мм | 4 |
| Стойка металлическая 10 мм | 4 |
| Винт М3 х 25 мм | 4 |
| Винт М3 х 8 мм | 6 |
| Винт М3 х 6 мм | 18 |
| Гайка М3 | 12 |
| Блок управления R-5B | 1 |
| Контроллер Arduino Nano | 1 |
| Модуль Гироскоп-акселерометр | 1 |
| Кабель USB | 1 |
| Электромотор с редуктором ТТ-130 (1:48, 250 rpm) | 2 |
| Пластиковое колесо 65 мм | 2 |
| Уголок крепления мотора | 2 |